

- Title: Besiege
- Release Date:
- Developer:
- Publisher:
Information about Besiege is still incomplete. Please help us fill the details of the game using this contact form.
This is for players who already know how to get a plane off the ground. Here you’ll see how to make your plane more stable and more controllable, along with what causes instability.
The goal is, that by the end of this guide, you’ll be able to improve your plane-building and know why certain things work and certain things don’t. I’ll also explain some basic concepts you need to understand when building a plane.
Torque and Propulsion
Methods of Propulsion
The most iconic and common method of propulsion are propellers, so I’ll dedicate the coming bits to them. While you can also use nives and rockets, the only other method of propulsion viable in vanilla Besiege is steam cannons. There really isn’t much to say about them, except they don’t apply torque to the plane, and that they can be made a hell of a lot more powerful by placing multiple in the same spot, and using the copy-paste bug to copy and paste the x4 power setting from the shrapnel cannon into them.
What Creates Torque
There are many different things that can cause it, but in this section, I’ll mostly talk about what always needs to be addressed in propeller-based planes.
If we place a wheel on a pinned block, the wheel will spin, and that’s it. However, planes are not pinned blocks and they are freely rotating, so it’s important to understand how torque works.
If we place that same wheel on a freely rotating object, the wheel will not rotate as fast as before, but most notably, the object will begin to rotate in the direction opposite to that of the wheel. Planes that use propellers will experience this, and there are a few ways to reduce this torque that would otherwise make the plane roll uncontrollably.
What Effects Rotation Speed
If we attach a heavy object to the wheel, the wheel will spin slower and the object behind it will spin faster. By increasing the mass, we’ve increased the moment of inertia. From this, it’s clear that the rotation speed of an object in this configuration is inversely proportional to its moment of inertia, but is proportional to the moment of inertia of the other object. This will be important later on in this section.

In this image, even though the wheel made a full rotation, the object behind it barely even tilted.
Countering Torque with Even Numbers of Propellers
Planes with an even number of propellers can have propellers rotating in opposite directions, applying the same amount of torque to the wings in opposite directions. The two torques will ideally cancel each other out.
Depending on how far from the center these propellers are, and how large and heavy they are, they can bend the wings upwards or downwards, shifting the center of mass, and making the plane pitch up or down. Because of this, it’s important to properly brace your plane.
Countering Torque with Odd Numbers of Propellers
No matter how you balance the other propellers, there will be at least one propeller applying torque to the plane with no other propellers to counter it. This one propeller will have to be different from other propellers.

These two images are of a “single” propeller that applies no torque to the plane. It does this by actually being two propellers on the same axis, countering each other’s torque. Its centerpiece is freely rotating and attached to hinges. This is because there’s always an imbalance of torque, meaning some would otherwise be applied to the plane. The hinges make sure there’s never any torque being applied, at the expense of a very small amount of speed. The design on the right is made for higher speeds.
Side note: At high RPM, due to huge acceleration, the braces of the design on the left will break. The acceleration option in Besiege only seems to have a linear effect on the speed when there’s no load on the wheels. When there is load, speed experiences an exponential increase, effectively serving more as response delay than actual acceleration reduction

In this image is a true single propeller. It applies no torque to the plane because it’s attached to it with a hinge (the unpowered wheel acts like one). This is where the part about rotation speed is important: the unpowered wheel represents an object behind the wheel, and the propeller represents the object in front of the wheel. The propeller is much much heavier than the unpowered wheel, and because of that, while the unpowered wheel spins at high speeds, the propeller will spin slowly, resulting in low propulsion and low speeds. This is what the Besiege tutorial plane suffers from.
Since the rotation speed of the propeller is proportional to the moment of inertia of the unpowered wheel, increasing it by adding braces will make the propeller much better, as can be seen in the image above.
Variable Propulsion
This is really an extra feature for your plane and is in no way a must-have. You don’t really need to vary the amount of propulsion between more than 2-3 speed settings, and those can easily be applied by just changing the controls, and if you really want to, you can improve speed switching with automation blocks. If you really want to be able to switch to any speed setting, you will have to change more than just the controls of your propellers.
The pictures below are that of a single propeller that can change the angle of attack of propeller blades, a control unit for a plane with three-speed settings, and a variable steam cannon thruster.


Wing Panels and Causes of Instability
What Do Wing Panels Do
Other than providing lift, they make the plane a lot more stable and easily controllable. They largely dampen small vibrations and other things that would cause a shift in direction, but much more importantly, they heavily reduce the turning acceleration the plane would otherwise have. Drag is proportional to the square of the speed, making it so you can have quickly responding controls when using panels, that have relatively constant and predictable turning.
- Make sure to use a lot of wing panels.
- Wing panels on the ZY plain reduce yaw shift.
- Wing panels on the ZX plain always reduce pitch shift and reduce roll shift when at the front of the plane.
- Wing panels on the YX plane are never used because they only contribute to drag. I’ve only used one of those, and it had a very specific use of making a plane fly at very low speeds and heavily reducing its acceleration when going down.
The center of lift and mass
The center of mass is usually going to be in the front half of the plane, which makes sense because the front part has the propellers, the wings, most of the bracing…
The center of lift, however, will be behind the center of mass because almost the entire tail of the plane contributes to lift. In other words, the lift/mass ratio of the tail is higher than that of the front.
This will have no effect on your plane when flying it in 0G, because there is no gravitational pull, and no need for the lift to be a factor most of the time. However, with gravity, you always have two vectors pulling up and down, so you get torque which makes the plane pitch downwards.
Landing gear
The landing gear is fairly simple, so I’ll just say that if you want to make it retractable, add an altitude sensor that will raise or lower it automatically.
Other than that, the landing gear will shift your plane’s center of mass downwards, making so it’s no longer in the same line as the center of propulsion. This once again creates a torque that makes your plane pitch downwards.
There are a few ways to go about solving this pitching downwards.
- . A “Gyro” (I know they’re not gyros, but everyone calls them that)
The heaviest complex solution out of these three, and one you should use only if the pitch is extreme. It offers constant torque. - Tilted wing panels. The most simple solution, simply done by rotating a wing panel or two by a few degrees. The torque you get depends on speed, so you might get a plane that pitches downwards on low speeds and pitches upwards on high speeds.
- Flying blocks Simpler, but weaker “gyros”.
All of these solutions double the torque instead of reducing it when the plane is up-side-down. The downwards pitch isn’t overly bad, so you don’t need to use any of these.
Roll and yaw shifting and instability
They’re both usually caused by asymmetry and loose roll and yaw wing panels. If the roll is extreme, the problem is likely asymmetry in broken 0 angles of attack propeller blades. (if you don’t know what they are, then this isn’t the issue).
Turning
Turning with wing panels and propellers
Intuitively the first form of turning you’re going to try. It’s mostly simple and looks nice. If you’re struggling with this form of turning, low turning speed is likely your problem. The further away from the center of mass your turning wing panels are, the more effective they’ll have.
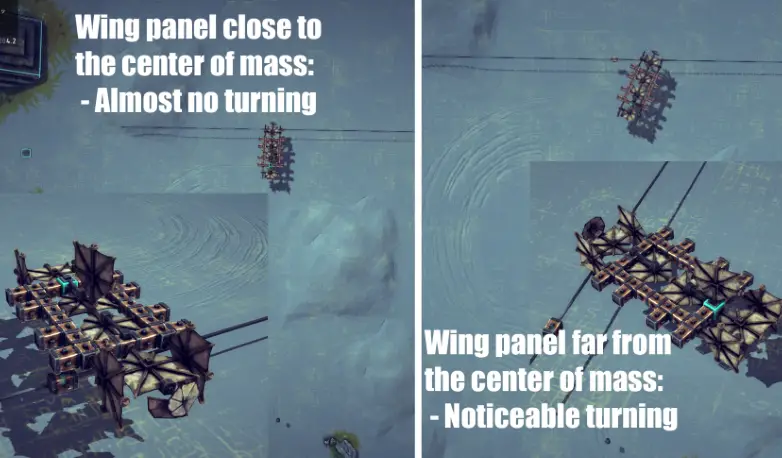
The advantage of this is that you get fast turning even at high speeds.
Turning with “gyros”
Also very simple turning. Gyro turning is easier to add to your plane than panel turning because to achieve a lot of turning power, you don’t need to place them far from the center, but close to the axis passing through the center mass.
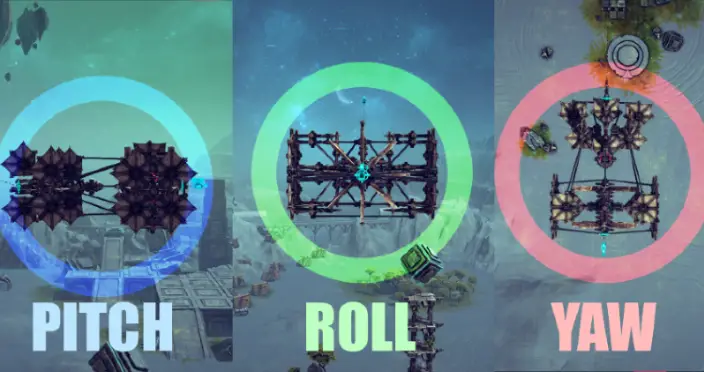
- Pitch gyro needs to be close to the X axis (red)
- Roll gyro needs to be close to the Z axis (blue)
- Yaw gyro needs to be close to the Y axis (green)

Along with being easy to attach to your plane, gyro turning offers very quick response times and is good at low speeds.
Fighting with controls
This usually only happens with yaw for me. You’ll try to turn the plane left, but the moment you release the key, the plane will return slightly to the right.
When turning, planes aren’t moving in the same direction they’re facing. Because of this and drag, some force is applied to yaw panels on the tail and yaw panels at the front. If the tail is more affected by drag (has more panels), the plane will be experiencing torque until it begins moving in the same direction it’s facing. This can be fixed by removing some yaw panels from the tail or adding more yaw panels at the front.
That's everything we are sharing today for this Besiege guide. This guide was originally created and written by Smoke. In case we fail to update this guide, you can find the latest update by following this link.