
Melhorar em cima da já conhecida automação de reatores, ao mesmo tempo em que não a torna uma luta de componentes de uma hora.
Bônus! Meu equipamento para testes comparativos de automação de reatores está na oficina.
Noções básicas do reator
Você tem 2 subsistemas no reator – geração de calor (fissão) e produção de energia (turbina) que usa esse calor.
O reator ideal gera calor apenas o suficiente para a turbina gerar a quantidade exata de energia para a carga que o submarino requer.
Se o calor gerado for mais do que “pouco suficiente”, você desperdiçará combustível e, em casos extremos, derreterá o reator.
Se a energia gerada exceder a carga, você danificará o equipamento elétrico do navio.
Há casos em que você gostaria de “desperdiçar combustível” (produção de varetas de combustível esgotada) ou sobrecarregar a rede (treinamento de habilidades elétricas), mas não abordaremos isso agora.
Requisitos não funcionais – use menos recursos (componentes) para a compilação e mantenha-a o mais simples possível.
Abordagem típica de automação de reatores
A escolha da automação do reator depende da disponibilidade de recursos no submarino.
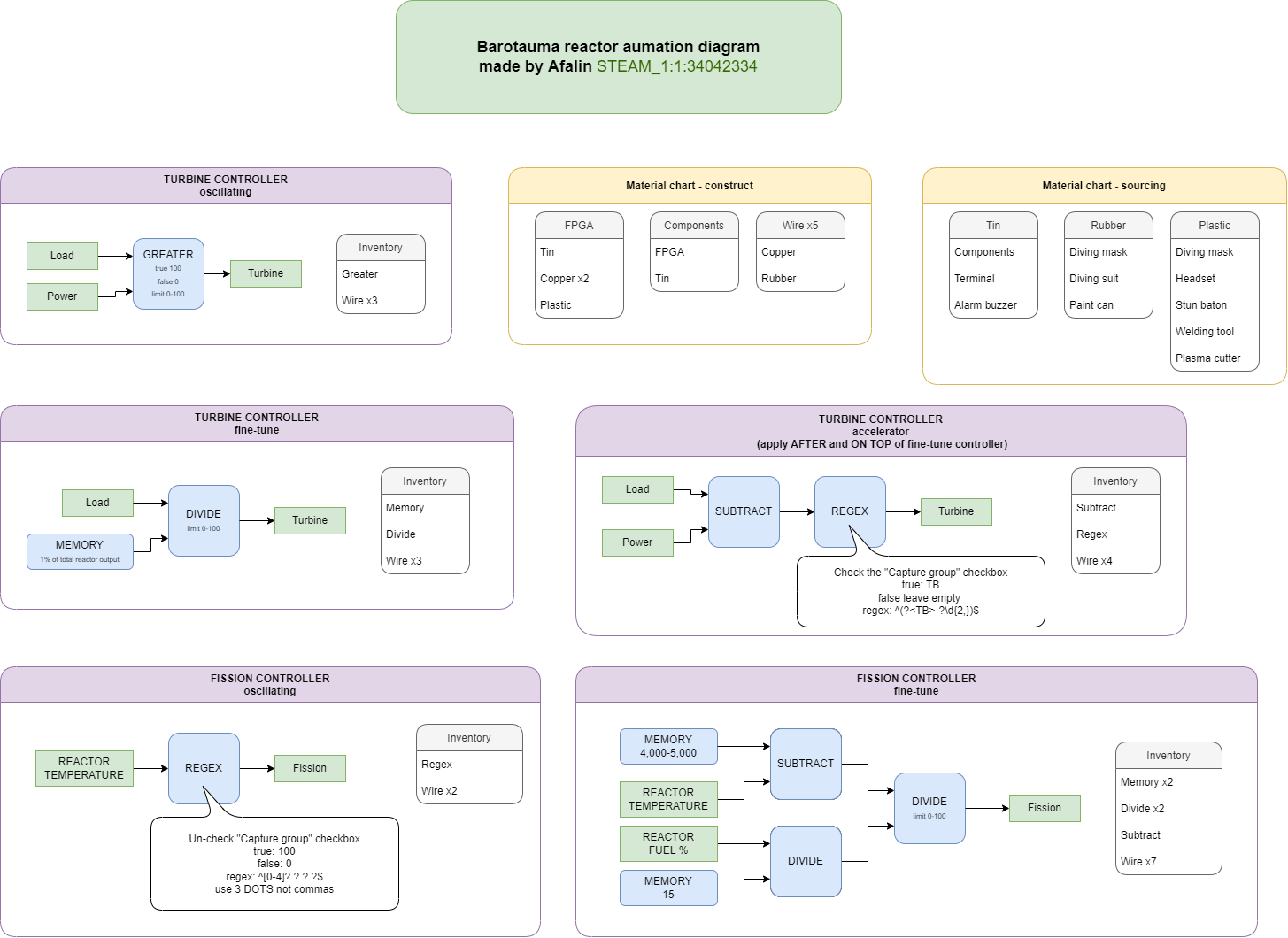
1ª variante e a mais regular (e, sem dúvida, maior) é um reitor de 2 componentes.
Ele usa o componente regex para controlar a entrada para a temperatura do reator e um componente maior para a saída da turbina.
É a variante mais “reativa”, pois usa apenas valores 0 e 100 para operar. Por isso, oscila os dois controles (quase) constantemente e tende a oscilar em torno de posições ideais.
Se apenas 1 componente estiver disponível, automatize a taxa de fissão primeiro. Ele permite o uso de várias hastes sem inconvenientes e o superaquecimento do reator é muito mais irritante do que a ineficiência da turbina.
O valor da temperatura depende da oferta e demanda do submarino, mas eu começaria com 3999, mudando até 4999, se necessário.
Lista de recursos: 2 componentes, 5 fios.
(Eu não sou o autor dessa abordagem, incluindo apenas para referência)
Automação de reatores não oscilantes
O modo alternativo de controle da turbina seria seguir a carga precisa que a sub demanda.
Adicione um componente de memória com valor maxReactorVoltage/100 e divida a carga por esse número. O controle deslizante da turbina do reator agora deve seguir sempre o meio da faixa verde.
Portanto, quando a rede não experimenta grandes picos de carga (ou seja, o submarino está ocioso enquanto a tripulação está ausente em uma missão de mergulho), o reator agirá como ideal.
A precisão tem um preço – ajusta a potência de saída mais lentamente do que o reator é capaz.
Razão por trás disso – o controle da turbina tem inércia – ele se ajusta mais lentamente quanto mais próximo do valor definido.
Por si só, esse método é pior para o submarino do que o controle da turbina de “componente maior” por causa dos danos aos sistemas elétricos do navio.
Acelerador de turbina – melhor automação do reator
Adicione o acelerador Turbine para combinar a precisão com a reatividade do reator de 2 componentes.
(Essa é minha contribuição original para a comunidade de engenharia de trauma)
Adicione um “subtrair” e outros componentes regex ao ensopado. Eles trarão a saída na área desejada na velocidade máxima e deixarão o ajuste preciso para a configuração existente.
Ele precisa ser aplicado NO TOPO e DEPOIS do controlador preciso devido à forma como os componentes são avaliados na versão atual do jogo.
(load – power) -> regex (verifique o valor do grupo de captura tb) expressão “^(?-?\d{2,})$” -> turbine_in
É até 50% mais eficiente no controle da turbina do que o controle preciso e não oscila sob carga constante.
Já é um mergulhador de trauma veterano? Aqui está tudo que você precisa.
Adicione subtração e regex em cima do controle de turbina baseado em MaxReactorPower-%.
carga – potência -> regex ^(?-?\d{2,})$ -> turbina_in

Isso é tudo o que estamos compartilhando hoje para isso Barotrauma guia. Este guia foi originalmente criado e escrito por Afalina. Caso não consigamos atualizar este guia, você pode encontrar a atualização mais recente seguindo este link.