

Não consegui encontrar nenhum guia em inglês sobre câmeras ou sistemas de vigilância, então aqui está um exemplo de um que fiz do zero. De que outra forma você pode saber que travessuras esses bots e palhaços irritantes estão fazendo?
O que você precisa
Este guia não vai explicar como usar o editor submarino, você terá que aprender isso em outro lugar ou sozinho.
Além de um periscópio e n câmeras, você precisa destes componentes:
- 1 componente de relé para cada câmera (para controlar a fonte de sinal da câmera)
- 1 componente de sinal para cada câmera (para permitir que cada relé se desligue ao clicar)
- 1 componente Delay para cada câmera (com 1 ou 0.5 delay, fica a seu critério)
Eu recomendo terminar o seu sub e decidir onde você quer as câmeras, em vez de construir tudo em torno do seu novo sistema de câmeras. 😛
A única coisa que você terá que alterar nas propriedades desses componentes é ativar o primeiro relé na cadeia em margarida no editor (eles estão ativados por padrão) e desativar todos os outros relés.
Quando feito corretamente, o controle da câmera começará com o último Relay na cadeia e permitirá que todas as câmeras façam loop uma após a outra com um clique do mouse.
Fiação
Veja como funciona a fiação de cada componente.
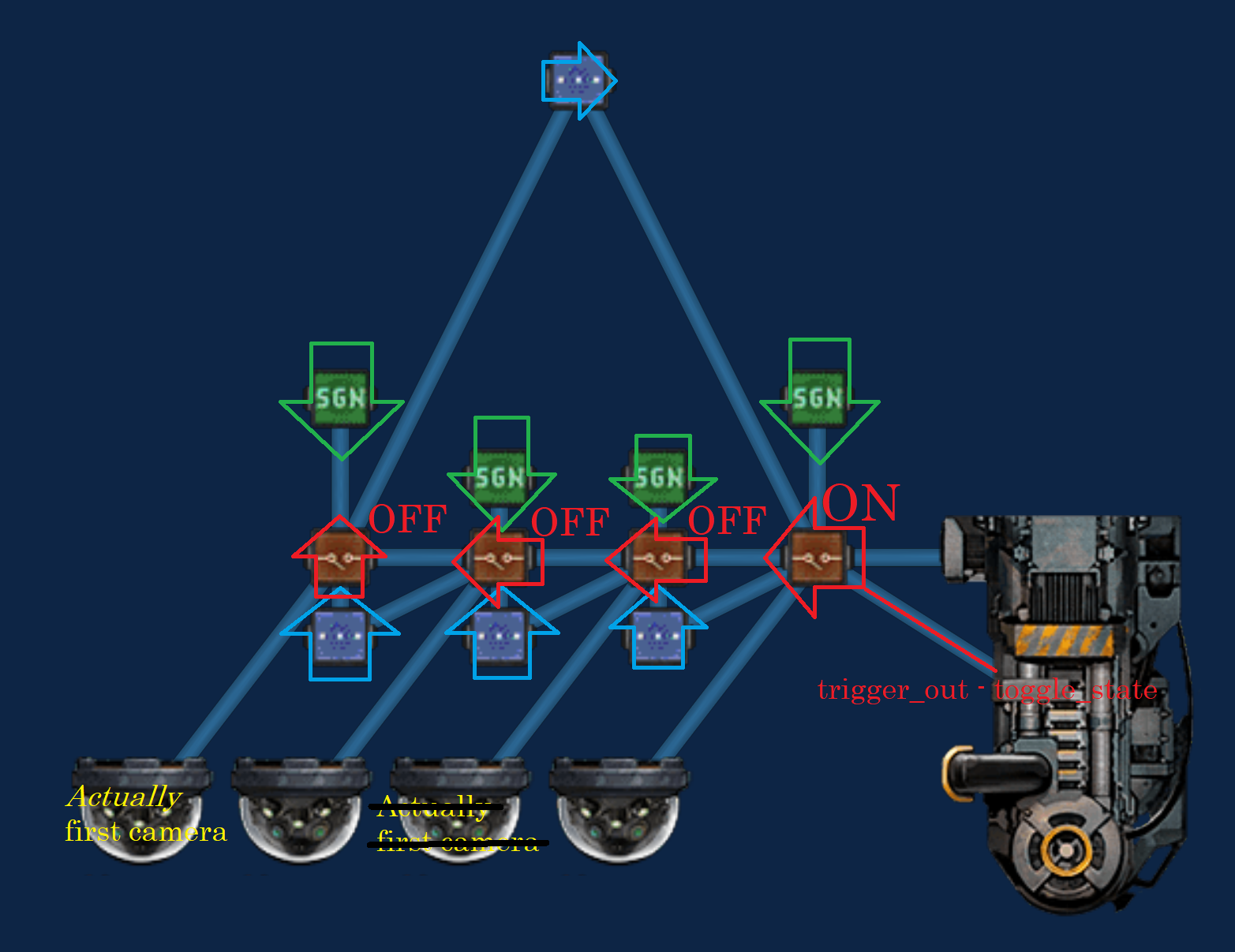
Fio do periscópio posição_out pino para cada relé sinal_em_1 PIN.
Fio do periscópio gatilho_out pino para cada relé sinal_em_2 PIN.
O sinal de disparo também deve ser conectado ao primeiro relé separadamente (gatilho_out -> alternar_estado)!

Conforme mencionado acima, o primeiro relé também deve ser definido como LIGADO no editor, enquanto os relés subsequentes devem ser desligados. O loop não pode ser repetido se isso não for feito corretamente.
A imagem mostra como fica a fiação para o primeiro Componente de relé! Todos os outros relés têm um fio a menos no pino toggle_state.
De cada relé, conecte de sinal_em_1 fixar na câmera control_in PIN.
Fio de sinal_em_2 pin para os componentes de sinal e atraso emparelhados de cada relé sinal_in PIN.
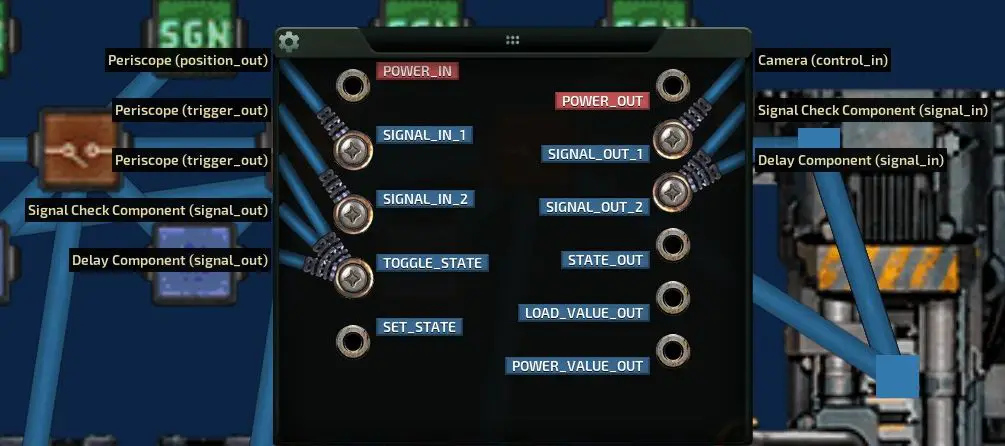
Todos os outros componentes do relé devem ser idênticos exceto que eles não têm o sinal trigger_out do periscópio que vai direto para o toggle_state.
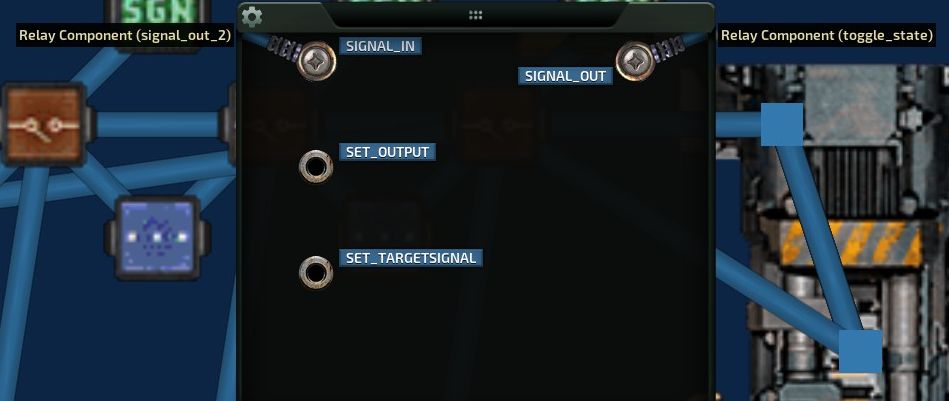
A verificação de sinal está lá apenas para fazer o loop do sinal, de modo que o relé se desligue quando receber a entrada do acionador e permita que o próximo relé na linha lide com as saídas do periscópio.
Fio sinal_out de cada sinal, volte para o relé de origem alternar_estado PIN.
Você pode alterar o atraso ao seu gosto nas propriedades do componente. Eu prefiro 0.5 segundos de atraso.
Fio sinal_out de cada Delay para o próximo Relay's alternar_estado PIN.

Gravação do sistema de câmeras em ação
Com atraso de 0.5
https://youtu.be/e35UEBRx7o4
Portanto, a essência da fiação é simplesmente passar o controle de cada relé e visualizar de cada câmera para a próxima com um clique do mouse.
Deixe-me saber nos comentários se você tiver alguma dúvida ou sugestão de melhorias. 🙂 Eu sei que isso não é um bom guia, mas se você aprender o básico do editor de submarinos e do material de fiação, poderá construí-lo por conta própria. Talvez eu libere o sistema nas Oficinas em algum momento também. Obrigado por ler!
Isso é tudo o que estamos compartilhando hoje para isso Barotrauma guia. Este guia foi originalmente criado e escrito por 76561198014977458. Caso não consigamos atualizar este guia, você pode encontrar a atualização mais recente seguindo este link.