

Snelle handleiding voor het instellen van een rover/robot die de speler volgt en volgt zonder scripts. Werkt alleen op planeten (voorlopig...) Wordt hoogstwaarschijnlijk achterhaald door de AI-update.
Inleiding en dankbetuigingen
Eerst en vooral sta ik hier op de schouders van reuzen. Ingenieurs als BlackArmor en Splitsie zijn twee grote namen die me aan het denken hebben gezet in deze game. Heck, het gyro-volgsysteem is sterk geïnspireerd op BlackArmor's vroege (pre-turret controller) spelersvolglichtontwerpen.
Ik kan me niet herinneren waarom ik de eerste rover voor het volgen van spelers heb ontworpen. Ik denk dat het een ontwerpoefening was, om te zien wat ik zou kunnen doen zonder een programmeerbaar blok. Aan degenen onder u die C# begrijpen, groet ik u. Ik probeerde objectgeoriënteerd programmeren te begrijpen, en het enige wat ik kreeg was hoofdpijn.
Ik zal PTR-4 posten, en zijn kleinere (sommigen zeggen misschien "schattiger") neef, de PTR-3 naar de werkplaats. Hoewel het verleidelijk kan zijn om gewoon de werkplaatsblauwdrukken te gaan halen, zou ik je willen aanmoedigen om eerst je eigen blauwdrukken te bouwen. Voordat je gaat zeggen "maar ik ben niet slim genoeg" of "Ik ben niet goed in dit soort dingen", gebruik deze gids als een kans om te leren. Vertrouw me als ik zeg dat ik enorm heb gefaald bij het ontwerpen van deze rovers, en de vroege ontwerpen waren helemaal niet esthetisch.
Quick Primer op Gyros
Om eerlijk te zijn, gyros verdienen waarschijnlijk hun eigen gids. Sterker nog, ik weet zeker dat er al betere handleidingen en tutorials zijn gemaakt. Dus hier is een snelle om je enigszins op de hoogte te houden.
Een gyro is een apparaat dat een koppel of een rotatiekracht op een rooster uitoefent. Meestal worden gyroscopen gebruikt met input van spelers om de oriëntatie van dynamische (verplaatsbare) rasters te regelen. Wanneer de gyro-override is ingeschakeld, zal de gyro proberen het rooster waarmee het is verbonden te laten draaien en de input van de speler negeren. De spinsnelheid en rotatie-as worden bepaald in de gyro-instellingen. Voor het volgen van spelers worden de gyros overschreven.
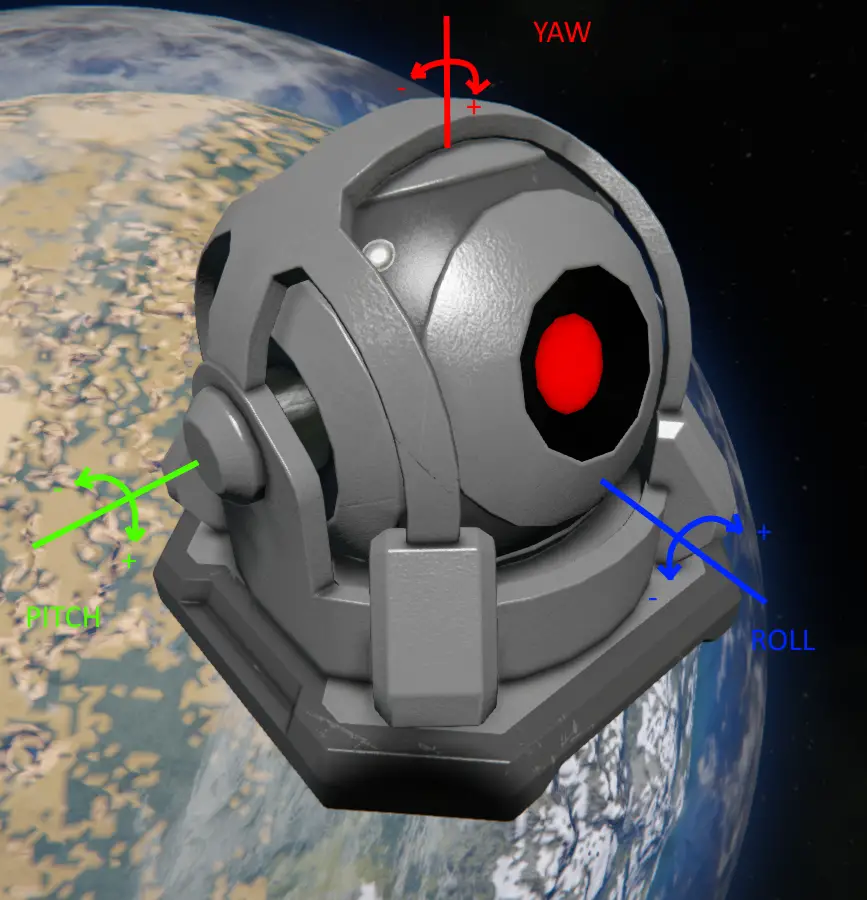
In de bovenstaande afbeelding kunt u de rotatie-assen ("aksees") van de gyro zien, en de draairichting met een positieve (+) of negatieve (-) override-waarde. Merk op dat de ene kant van de kleine rastergyro één divot/stip heeft (afgebeeld) en de andere kant twee. Dit detail is cruciaal voor de juiste plaatsing van de gyro en het aanpassen van de instellingen.
Het PTR-4 basisrover/robotchassis
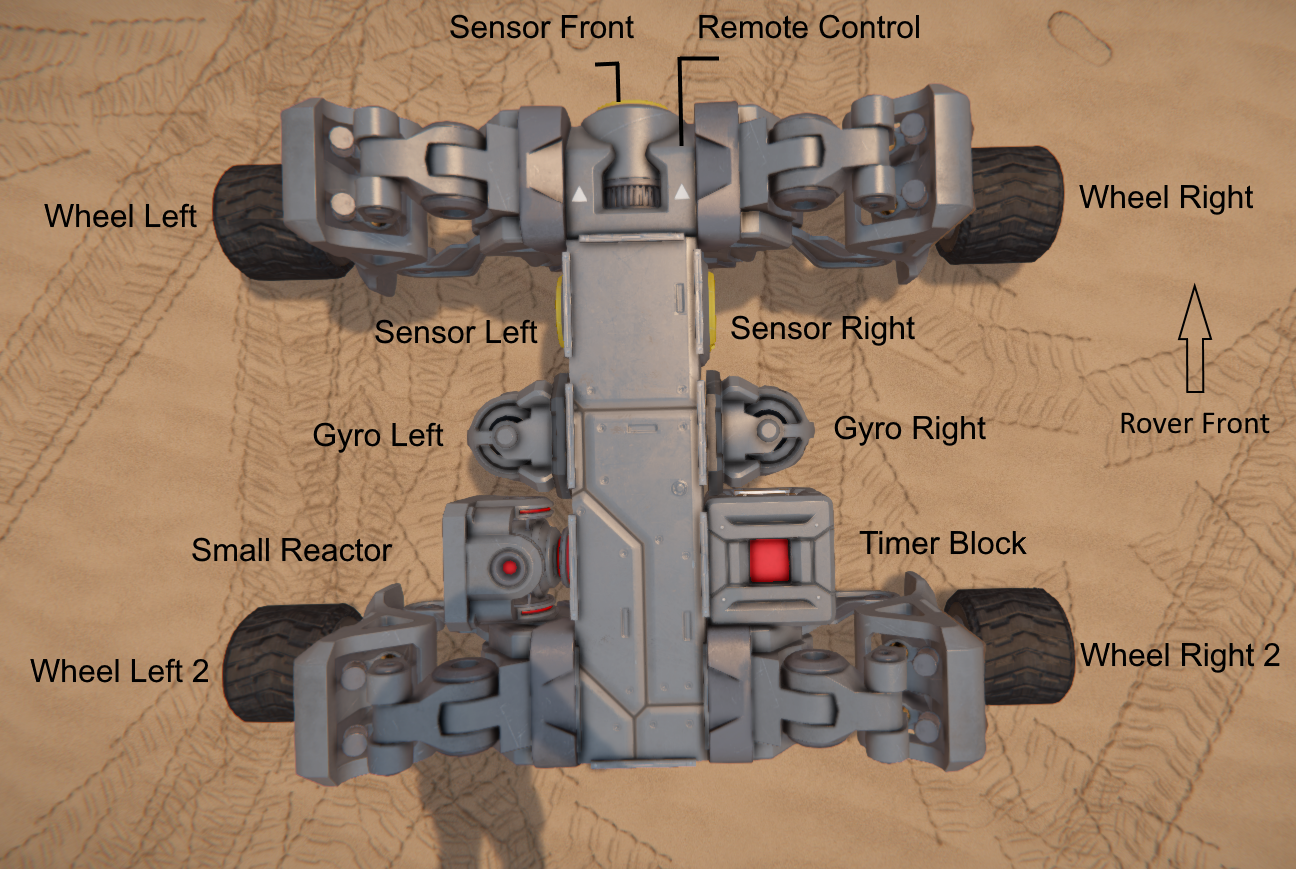
De PTR-4 is de vierde generatie van mijn PTR (of Peter) serie rovers, en de 5e variant in mijn ontwikkeling van scriptvrije "robots". Ik heb de lay-out van de PTR-4 ontworpen om open en (hopelijk) gemakkelijk te begrijpen te zijn. Hieronder ziet u de lay-out van de rover en al zijn componenten.
Enkele tips voor het bouwen: Ik zou aanraden om eerst een blok met een bedieningspaneel te plaatsen. Dit kan een sensor zijn, of de reactor. U hebt alleen een manier nodig om toegang te krijgen tot het configuratiescherm voor het raster. Op deze manier kun je de blokken hernoemen terwijl je ze plaatst, met name de sensoren en gyroscopen (zie lay-outafbeelding voor mijn naamgevingsschema.) Ik raad aan om te bouwen zonder symmetrie ingeschakeld om hernoemen gemakkelijker te maken. Vertrouw me als ik zeg dat het gemakkelijker is om de naam te wijzigen terwijl je bouwt, in plaats van te proberen uit te zoeken welk blok welk blok is nadat je klaar bent met bouwen.
Volledige onderdelenlijst:
- Wielophanging 1×1 Links (x2)
- Wielophanging 1×1 rechts (x2)
- Licht pantserblok (x4)
- Sensor (x3)
- Afstandsbediening (x1)
- Gyroscoop (x2)
- Timerblok (x1)
- Kleine Reactor (x1)
Merk op dat in sommige gevallen de plaatsing van blokken belangrijk is. Als u deze handleiding volgt en de PTR-4 kopieert (of aan het rommelen bent met de werkplaatsblauwdrukken), zijn er een paar cruciale details waarmee u rekening moet houden. Het eerste detail is de gyro. Toen ik mijn eerste rover voor het volgen van spelers ontwierp, heb ik ervoor gezorgd dat beide gyroscopen de enkele divot/dot naar de achterkant van de rover hadden gericht. Dit maakt de gyroscopen in wezen gespiegeld, waardoor beide gyroscopen dezelfde instellingen kunnen hebben. Het tweede detail is de oriëntatie van de sensor. Hoewel niet zo cruciaal, moeten de sensoren zo worden georiënteerd dat de indicatorstrip zich aan de onderkant bevindt en het bedieningspaneel aan de bovenkant.

Configuratie van het rastercontrolepaneel
En nu wat waarschijnlijk het meest rommelige deel is van het bouwen van een rover voor het volgen van spelers: het raster instellen in het configuratiescherm. Ik hoop echt dat je de componenten hebt hernoemd terwijl je ze bouwde, met name de sensoren en gyroscopen.
Wiel instellingen
- Vermogen: 60
- Sterkte: 100
- Wrijving: 25
- Snelheidslimiet: instelbaar (ik gebruik 40 km/u)
- Aandrijving Override: 10% (.1) – Rechterwielen hebben mogelijk een negatieve override nodig.
Ik groepeer mijn wielen graag op een paar manieren. Eerst maak ik een groep met alle wielen, dit is handig om instellingen op alle wielen tegelijk te bewerken. Vervolgens maak ik een groep voor de linkerwielen, dan de rechterwielen. Om de een of andere reden hebben de juiste wielen mogelijk een negatieve override nodig. Dit wordt behandeld in het gedeelte afstemmen/foutopsporing van deze handleiding. Nadat uw wielen zijn ingesteld, moet u ze uitschakelen in het configuratiescherm totdat u klaar bent om uw rover te testen. Bij het testen van je rover raad ik een lage snelheidslimiet aan, zodat je alle rovers kunt vangen die proberen weg te rennen.
Gyro-instelling
Gyro setup is eigenlijk vrij eenvoudig. Zorg er eerst voor dat beide gyro's zijn uitgeschakeld. Vink vervolgens het override-vakje in het gyro-bedieningspaneel aan. Als u deze handleiding kopieert, moeten beide gyroscopen een pitch-override van +18 RPM hebben. Dit betekent dat de gyro zal proberen het rooster met 18 tpm te laten draaien (hij zou echter nooit zo snel moeten draaien).
Sensor instellen
Alle sensoren moeten zo worden ingesteld dat ze alleen spelers/personages detecteren en alleen de eigenaar detecteren. Alle andere detectie-opties moeten op "uit" staan.
Voorwiel
- Detectieslot (links) Afstandsbediening – Parkeer aan/uit
- Slot voor detectieverlies (rechts) Timerblok – Activeer nu
- Linkeromvang: 2
- Rechtsomvang: 2
- Bodemomvang: 2
- Hoogste omvang: 2
- Terug Omvang: 5
- Vooromvang: 4
Links
- Detectieslot (links) Gyro L – Schakel in
- Sleuf voor detectieverlies (rechts) Gyro L – Schakel uit
- Linkeromvang: 50
- Rechtsomvang: 50
- Bodemomvang: 2
- Hoogste omvang: 2
- Rugomvang: .5
- Vooromvang: 50
Rechts
- Detectieslot (links) Gyro R – Schakel in
- Sleuf voor detectieverlies (rechts) Gyro R – Schakel uit
- Linkeromvang: 50
- Rechtsomvang: 50
- Bodemomvang: 2
- Hoogste omvang: 2
- Rugomvang: .5
- Vooromvang: 50
Opmerking: als je net als ik bent, wordt het piepen van de sensoren na een tijdje vervelend. Vergeet niet de hoorbare detectie-instelling voor de sensoren in het bedieningspaneel uit te schakelen.
Instelling timerblok
Het timerblok is nodig als tijdelijke oplossing. Een van de eigenaardigheden van sensoren is dat je niet dezelfde "blokactie" -trigger kunt hebben voor zowel de detectie (linker slot) als detectieverlies (rechter slot). Het spel verplaatst die actie naar het laatste slot dat je probeerde in te stellen in. Aangezien het afstandsbedieningsblok alleen de aan/uit-schakelaar voor parkeren heeft, en geen expliciete aan/uit-commando's, hebben we de timer nodig zodat de voorste sensor de remmen kan schakelen wanneer hij de speler detecteert en wanneer hij niet langer de speler detecteert. speler. Om de timer in te stellen, zet u de schakelaar parkeren aan/uit voor het afstandsbedieningsblok in de actiebalk van de timer. De waarde van de tijdvertraging doet er niet toe voor deze build, aangezien de voorste sensor is ingesteld op "nu activeren".
Uw Rover/Robot afstemmen en debuggen
Ik zal eerlijk zijn, ik ben hier zelf nog steeds actief mee aan het experimenteren. In dit gedeelte worden enkele problemen behandeld die u kunt tegenkomen tijdens het bouwen van uw eigen rovers, evenals enkele tips voor het afstemmen (meestal gyroscopen en wielinstellingen).
De wielen draaien, maar de rover springt of probeert te draaien.
Als je dit gedrag ziet na het instellen van je rover, controleer dan de richting van de override van het wiel. Om de een of andere reden hebben de laatste paar PTR's die ik heb gebouwd een negatieve override op de wielen aan de rechterkant nodig. Als je rover van je weg begint te rijden, moet je alle overrides op je wielen omdraaien.
De rover gaat niet of stopt niet wanneer de voorste sensor de speler detecteert.
Dit probleem is voornamelijk te wijten aan het feit dat de parkeerrem is ingeschakeld en niet expliciet is in- of uitgeschakeld. Als u dit probleem tegenkomt, gaat u gewoon naar het bedieningspaneel van de rover en wijzigt u de status parkeren aan/uit in het afstandsbedieningsblok.
De rover cirkelt rond de ingenieur en stopt nooit.
Dit wordt meestal veroorzaakt door een onvoldoende override-waarde op de gyroscoop. De rover draait constant, maar de draaisnelheid is niet genoeg voor de rover om de ingenieur ooit te "ontmoeten". Om dit op te lossen, verhoogt u de gyro-override in kleine stappen (~ 5 – 1 RPM) totdat de rover niet langer in een baan om de ingenieur draait.
De rover draait onregelmatig wanneer hij de ingenieur probeert te volgen.
Dit kan worden veroorzaakt door een aantal problemen.
Het eerste probleem is dat de gyro-override te hoog is ingesteld. Probeer de override-waarde met kleine stappen te verlagen totdat de tracking een beetje gladder wordt. Zorg er echter voor dat u het niet te veel verlaagt, omdat dit het eerder besproken "baangedrag" kan veroorzaken.
Als je gyro-instellingen er goed uitzien, maar de tracking nog steeds onregelmatig is, kun je proberen de wrijving van de wielen te verminderen. Door de wrijving te verlagen, wordt de koppeldrempel voor de gyroscopen verlaagd en kunnen ze de rover soepeler laten draaien. Wees echter voorzichtig, het verlagen van de wielwrijving zal het vermogen van de rover om te stoppen belemmeren. De rover zal ook meer tijd nodig hebben om op snelheid te komen vanwege de lagere tractie.
De rover stopt bij de machinist, maar draait constant naar links en rechts.
Vergelijkbaar met de onregelmatige volgsectie hierboven, maar er is nog een ding dat u kunt proberen af te stemmen. Door de achterkant van de linker- en rechtersensoren te vergroten, ontstaat er een overlappende "gang". Als de ingenieur in deze gang wordt gedetecteerd, zullen beide gyroscopen actief zijn en zal de rover sneller stabiliseren. De breedte van deze gang heeft ook invloed op de volgnauwkeurigheid van de rover (ik ben nog steeds actief aan het experimenteren met deze methode om de rovers af te stemmen).
De rover volgt alleen de bouwer en niet de beoogde speler.
Om een rover die je hebt gemaakt een andere speler te laten volgen, stel je hem in als de eigenaar van het net. U moet naar het configuratiescherm gaan, alle modules in het configuratiescherm selecteren (ctrl+A voor pc) en het eigendom overdragen aan de beoogde speler.
De rover glijdt alle kanten op en volgt de ingenieur niet.
Zoals bij elke rover (bestuurd of autonoom) moet de instelling van de wielwrijving worden afgestemd op het oppervlak waarop de rover zal rijden. Ik vind voor de meeste rots- en vuiloppervlakken dat 25% prima werkt. Als uw rover voornamelijk op "gladdere" oppervlakken zoals ijs of pantserblokken zal rijden, is een hogere wrijvingsinstelling nodig.
De rover blijft de machinist tegenkomen, of stopt niet snel genoeg.
Dit kan op een aantal manieren worden opgelost.
U kunt de wielwrijving vergroten, zodat de rover sneller stopt wanneer de remmen worden gebruikt. Pas op dat u de wrijving niet te veel verhoogt, omdat dit de volgreactie van de rover kan beïnvloeden.
U kunt ook de voorwaartse offset van de voorste sensor vergroten, zodat de rover de monteur sneller detecteert en meer afstand heeft om te stoppen. Het nadeel van deze methode is dat de rover er langer over doet om te starten, omdat de monteur langer in de "stop"-zone zal zijn.
Dat is alles wat we hiervoor vandaag delen Space Engineers gids. Deze handleiding is oorspronkelijk gemaakt en geschreven door Djah00. Als we deze handleiding niet kunnen bijwerken, kunt u de laatste update vinden door deze te volgen link.
