

Ik kon geen Engelstalige handleidingen over camera- of bewakingssystemen vinden, dus hier is een voorbeeld van een handleiding die ik helemaal opnieuw heb gemaakt. Hoe kun je anders weten wat voor shenanigans die vervelende bots en clowns uitspoken?
Wat je nodig hebt
Deze gids gaat niet uitleggen hoe je de submarine-editor moet gebruiken, dat zul je ergens anders of zelf moeten leren.
Naast een periscoop en n camera's, hebt u deze componenten nodig:
- 1 relaiscomponent voor elke camera (om de signaalbron van de camera te bedienen)
- 1 signaalcomponent voor elke camera (zodat elk relais zichzelf kan uitschakelen bij klikken)
- 1 vertragingscomponent voor elke camera (met 1 of 0.5 vertraging, het is aan jou)
Ik raad aan om je sub daadwerkelijk af te maken en te beslissen waar je camera's wilt in plaats van het hele verdomde ding rond je nieuwe camerasysteem te bouwen. 😛
Het enige dat u hoeft te wijzigen voor de eigenschappen van deze componenten, is het eerste relais in de serieschakeling AAN te zetten in de editor (deze staan standaard aan) en alle andere relais UIT.
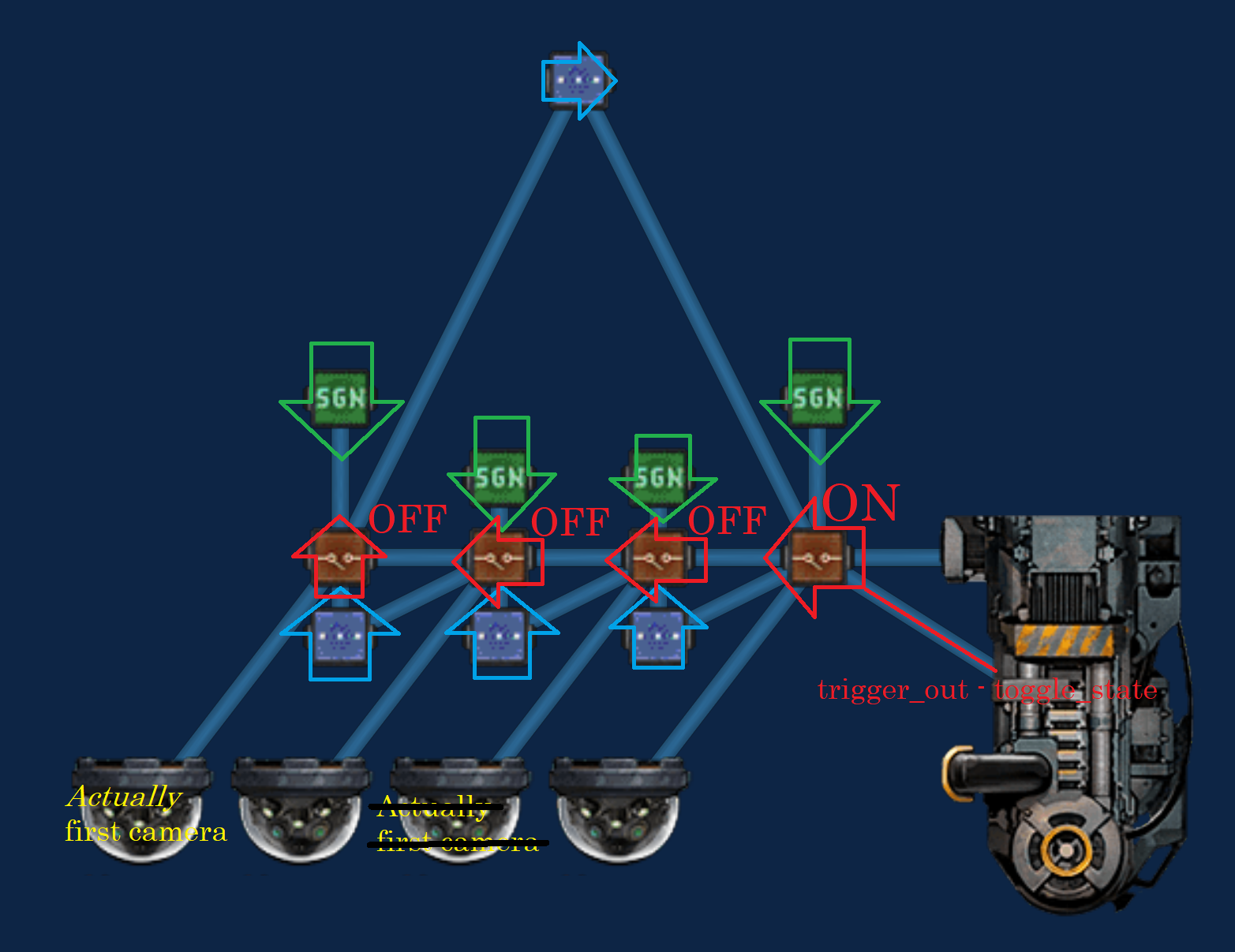
Als het goed is gedaan, begint de camerabesturing met het laatste relais in de keten en kunnen alle camera's met een muisklik achter elkaar doorlussen.
Bedrading
Hier ziet u hoe de bedrading voor elk onderdeel verloopt.
Draad van periscoop positie_uit speld op elk relais signaal_in_1 pijnboom.
Draad van periscoop trigger_uit speld op elk relais signaal_in_2 pijnboom.
Het triggersignaal moet ook afzonderlijk op het eerste relais worden aangesloten (trigger_uit -> toggle_state)!

Zoals hierboven vermeld, moet het eerste relais ook op AAN worden gezet in de editor, terwijl volgende relais op UIT moeten worden gezet. De lus kan niet worden herhaald als dit niet correct wordt gedaan.
De afbeelding laat zien hoe de bedrading eruit ziet voor de eerste Relais onderdeel! Alle andere relais hebben één draad minder op de toggle_state pin.
Van elk relais, draad van signaal_in_1 vastmaken aan de camera control_in pijnboom.
Draad van signaal_in_2 pin aan de gekoppelde signaal- en vertragingscomponenten van elk relais signaal_in pijnboom.
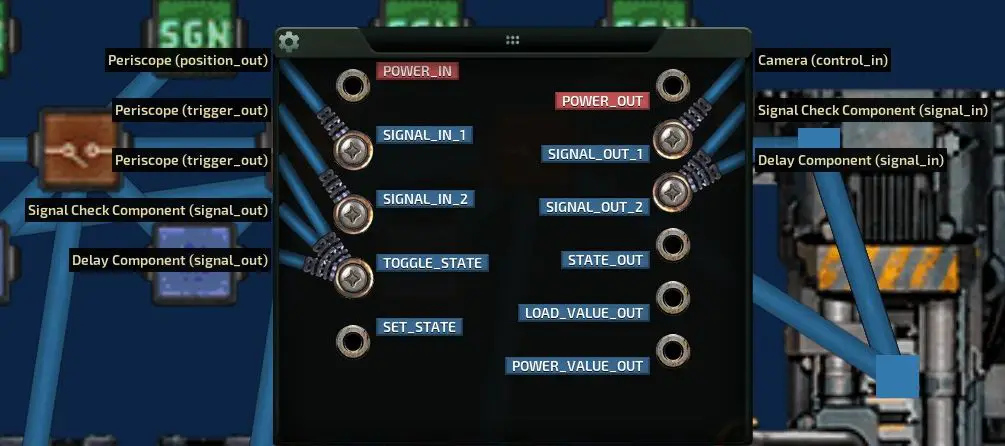
Alle andere relaiscomponenten moeten identiek zijn behalve dat ze het trigger_out-signaal van de periscoop missen dat rechtstreeks in toggle_state gaat.
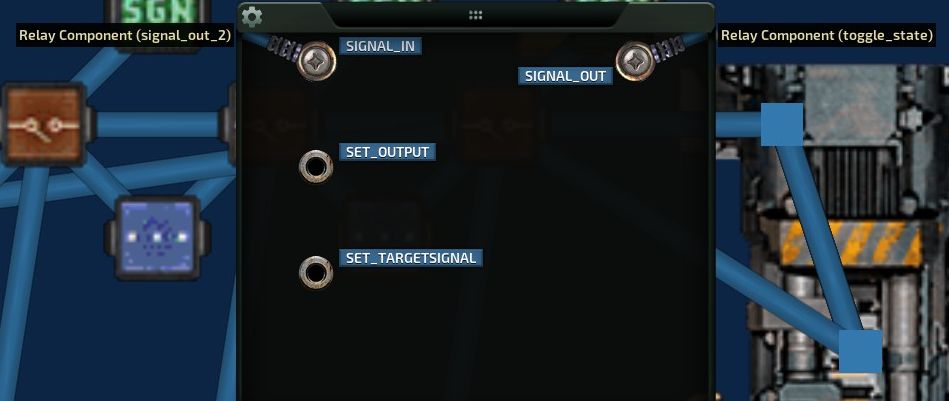
De signaalcontrole is er alleen om het signaal door te lussen, zodat het relais zichzelf uitschakelt wanneer het trigger-invoer ontvangt en het volgende relais in de rij de uitvoer van de periscoop kan verwerken.
Draad signaal_uit van elke signaalcontrole terug naar de bronrelais toggle_state pijnboom.
U kunt de vertraging naar wens wijzigen in de componenteigenschappen. Ik geef de voorkeur aan 0.5 seconde vertraging.
Draad signaal_uit van elke vertraging naar de volgende relais toggle_state pijnboom.

Opname van het camerasysteem in actie
Met 0.5 vertraging
https://youtu.be/e35UEBRx7o4
De essentie van de bedrading is dus om de besturing van elk relais en het beeld van elke camera eenvoudig door te geven aan de volgende met een muisklik.
Laat het me weten in de comments als je vragen of suggesties voor verbeteringen hebt. 🙂 Ik weet dat dit niet echt een gids is, maar als je de basis van de submarine-editor en bedrading leert, zou je dit zelf moeten kunnen bouwen. Ik zou het systeem op een gegeven moment ook op de Workshops kunnen vrijgeven. Bedankt voor het lezen!
Dat is alles wat we hiervoor vandaag delen barotrauma gids. Deze handleiding is oorspronkelijk gemaakt en geschreven door 76561198014977458. Als we deze handleiding niet kunnen bijwerken, kunt u de laatste update vinden door deze te volgen link.