

Non sono riuscito a trovare alcuna guida in lingua inglese su telecamere o sistemi di sorveglianza, quindi ecco un esempio di una che ho creato da zero. In quale altro modo puoi sapere quali imbrogli stanno combinando quei fastidiosi robot e pagliacci?
Quello di cui hai bisogno
Questa guida non spiegherà come utilizzare l'editor sottomarino, dovrai impararlo altrove o da solo.
Oltre a un periscopio e n fotocamere, sono necessari questi componenti:
- 1 componente relè per ciascuna telecamera (per controllare la sorgente del segnale della telecamera)
- 1 componente di segnale per ciascuna telecamera (per consentire a ciascun relè di spegnersi al clic)
- 1 componente di ritardo per ogni telecamera (con ritardo di 1 o 0.5, dipende da te)
Consiglio di finire effettivamente il tuo sub e di decidere dove vuoi le telecamere invece di costruire l'intera dannata cosa attorno al tuo nuovo sistema di telecamere. 😛
L'unica cosa che dovrai modificare per le proprietà di questi componenti è attivare il primo relè nel collegamento a margherita nell'editor (sono attivi per impostazione predefinita) e disattivare tutti gli altri relè.
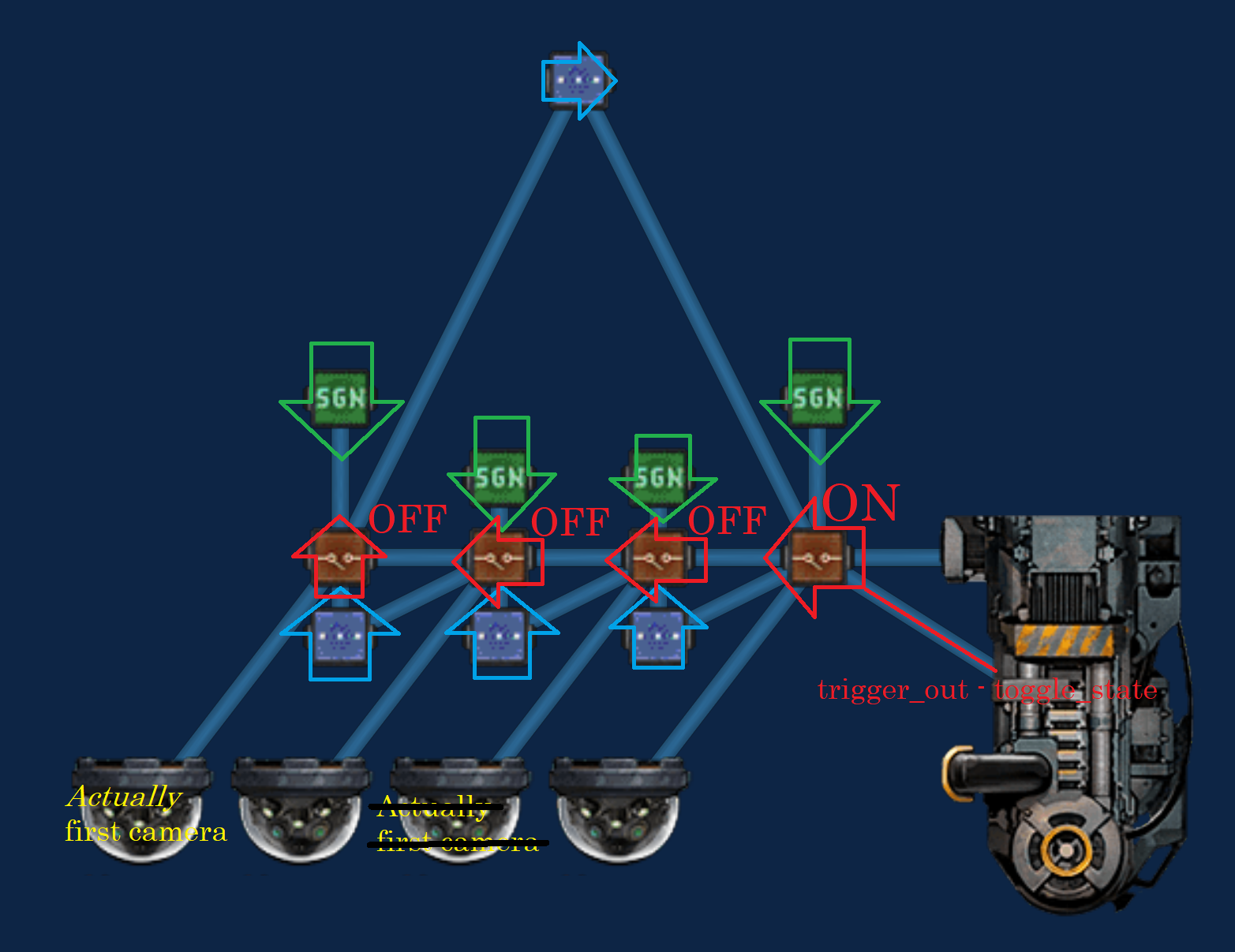
Se eseguito correttamente, il controllo della telecamera inizierà con l'ultimo relè della catena e consentirà a tutte le telecamere di eseguire il loop una dopo l'altra con un clic del mouse.
Cablaggio
Ecco come va il cablaggio per ogni componente.
Filo dal periscopio posizione_fuori pin a ciascun relè segnale_in_1 perno.
Filo dal periscopio trigger_out pin a ciascun relè segnale_in_2 perno.
Anche il segnale di trigger deve essere cablato separatamente al primo relè (trigger_out -> attiva/disattiva_stato)!

Come accennato in precedenza, anche il primo relè deve essere impostato su ON nell'editor mentre i successivi relè devono essere disattivati. Il ciclo non può essere ripetuto se questo non è fatto correttamente.
L'immagine mostra come il cablaggio cerca il prima di tutto Componente relè! Tutti gli altri relè hanno un filo in meno sul pin toggle_state.
Da ogni relè, cablare da segnale_in_1 appuntare al control_in della fotocamera perno.
Filo da segnale_in_2 pin ai componenti di segnale e ritardo accoppiati di ciascun relè segnale_in perno.
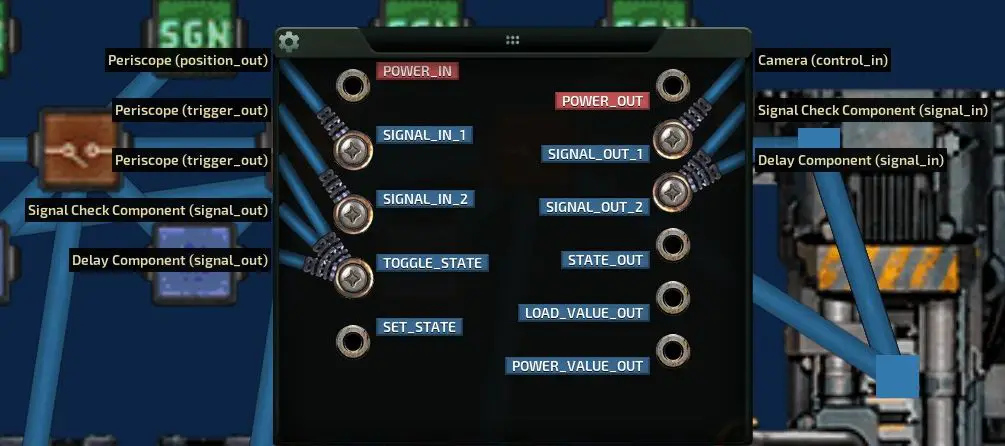
Tutti gli altri componenti del relè dovrebbero essere identici con l’esclusione di che mancano del segnale trigger_out da periscope che va direttamente in toggle_state.
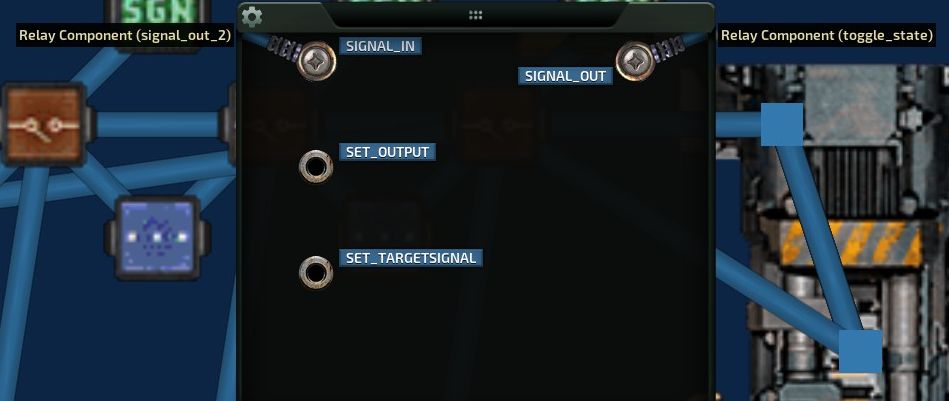
Il controllo del segnale è lì solo per eseguire il loop del segnale in modo che il relè si disattivi automaticamente quando riceve l'input di trigger e consenta al successivo relè in linea di gestire le uscite dal periscopio.
Wire segnale_uscita da ogni controllo del segnale torna al relativo relè di origine attiva/disattiva_stato perno.
Puoi modificare il Ritardo a tuo piacimento nelle proprietà del componente. Preferisco un ritardo di 0.5 secondi.
Wire segnale_uscita da ogni ritardo al successivo relè attiva/disattiva_stato perno.

Registrazione del sistema di telecamere in azione
Con ritardo di 0.5
https://youtu.be/e35UEBRx7o4
Quindi l'essenza del cablaggio è semplicemente passare il controllo da ciascun relè e visualizzare da ciascuna telecamera alla successiva con un clic del mouse.
Fatemi sapere nei commenti se avete domande o suggerimenti su miglioramenti. 🙂 So che questa non è una gran guida, ma se impari le basi dell'editor di sottomarini e del cablaggio, dovresti essere in grado di costruirlo da solo. Potrei anche rilasciare il sistema sui Workshop a un certo punto. Grazie per aver letto!
Questo è tutto ciò che condividiamo oggi per questo barotrauma guida. Questa guida è stata originariamente creata e scritta da 76561198014977458. Nel caso in cui non riusciamo ad aggiornare questa guida, puoi trovare l'ultimo aggiornamento seguendo questo link.