

Guía rápida sobre cómo configurar un rover/robot que rastree y siga al jugador sin scripts. Solo funciona en planetas (por ahora...) Lo más probable es que quede obsoleto con la actualización de IA.
Introducción y agradecimientos
En primer lugar, estoy parado sobre los hombros de gigantes aquí. Ingenieros como BlackArmor y Splitsie son dos grandes nombres que me hicieron pensar fuera de la caja en este juego. Diablos, el sistema de seguimiento de giroscopios se inspira en gran medida en los primeros diseños de luces de seguimiento de jugadores de BlackArmor (antes del controlador de torreta).
No recuerdo por qué diseñé el primer rover de seguimiento de jugadores. Creo que fue un ejercicio de diseño, para ver qué podía hacer sin un bloque programable. A aquellos de ustedes que comprenden C#, los saludo. Traté de entender la programación orientada a objetos y todo lo que obtuve fue un dolor de cabeza.
Publicaré el PTR-4, y su primo más pequeño (algunos pueden decir "más lindo"), el PTR-3 en el taller. Si bien puede ser tentador ir a buscar los planos del taller, te animo a que construyas el tuyo primero. Ahora, antes de ir y decir "pero no soy lo suficientemente inteligente" o "no soy bueno en cosas como esta", utilice esta guía como una oportunidad para aprender. Confía en mí cuando digo que fallé muchísimo al diseñar estos rovers, y los primeros diseños no eran estéticos en lo más mínimo.
Introducción rápida sobre giroscopios
Para ser honesto, los giroscopios probablemente merecen su propia guía. De hecho, estoy seguro de que ya se han hecho mejores guías y tutoriales. Así que aquí hay uno rápido para ponerte un poco al día.
Un giroscopio es un dispositivo que aplica un par o una fuerza de rotación a una rejilla. La mayoría de las veces, los giroscopios se utilizan con la entrada del jugador para controlar la orientación de las cuadrículas dinámicas (móviles). Cuando la anulación del giroscopio está habilitada, el giroscopio intentará girar la cuadrícula a la que está conectado e ignorará las entradas del jugador. La velocidad de giro y el eje de rotación se determinan en la configuración del giroscopio. Para el seguimiento de jugadores, los giroscopios se anulan.
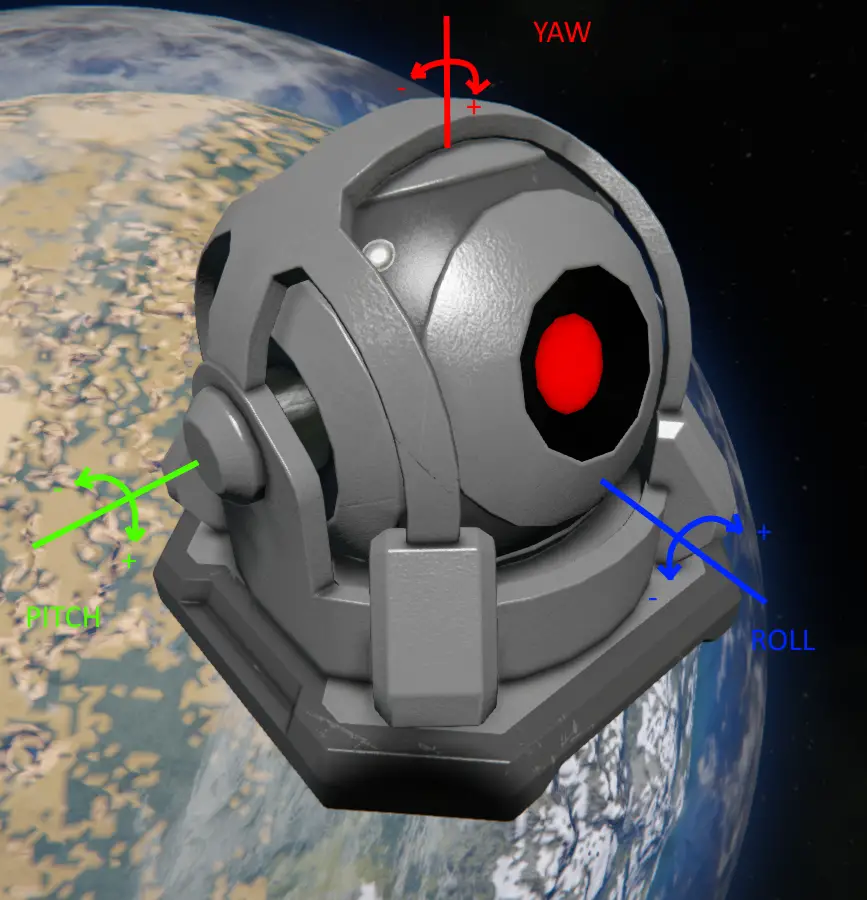
En la imagen de arriba, puede ver los ejes ("aksees") de rotación en el giroscopio y la dirección de rotación dado un valor de anulación positivo (+) o negativo (-). Tenga en cuenta que un lado del giroscopio de cuadrícula pequeña tiene un punto/divot (que se muestra) y el otro lado tiene dos. Este detalle es crucial para la colocación adecuada del giroscopio y el ajuste de la configuración.
El chasis móvil/robot básico PTR-4
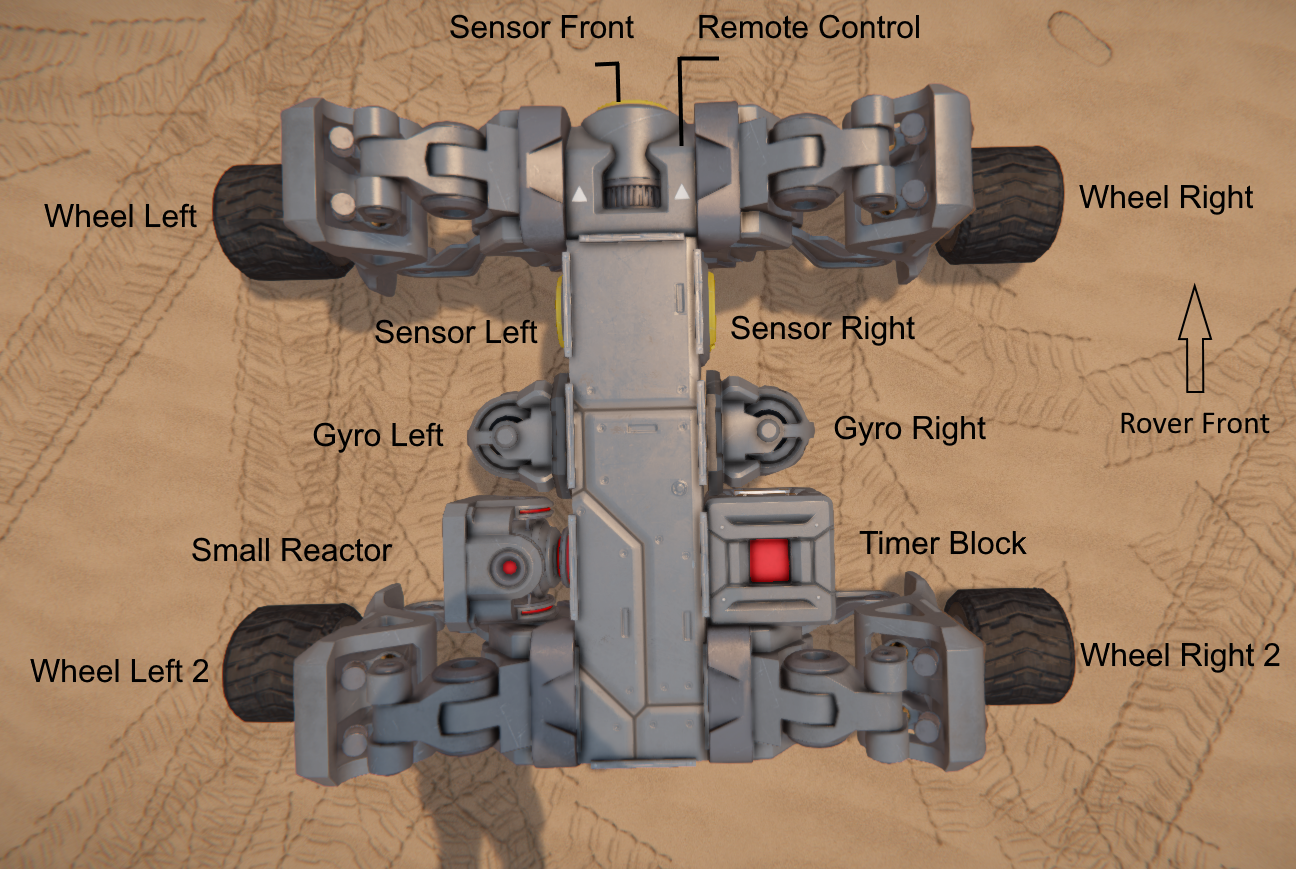
El PTR-4 es la cuarta generación de mi serie de rovers PTR (o Peter), y la quinta variante en mi desarrollo de "robots" sin scripts. Diseñé el diseño del PTR-5 para que fuera abierto y (con suerte) fácil de entender. A continuación, puede ver el diseño del rover y todos sus componentes.
Algunos consejos para construir: Yo recomendaría colocar primero un bloque con un panel de control. Esto puede ser un sensor, o el reactor. Solo necesita una forma de acceder al panel de control de la cuadrícula. De esta manera, puede cambiar el nombre de los bloques a medida que los coloca, específicamente los sensores y giroscopios (consulte la imagen de diseño para ver mi esquema de nombres). Recomiendo construir sin la simetría habilitada para facilitar el cambio de nombre. Confía en mí cuando digo que es más fácil cambiar el nombre a medida que construyes en lugar de tratar de averiguar qué bloque es cuál después de terminar de construir.
Lista completa de piezas:
- Rueda Suspensión 1×1 Izquierda (x2)
- Rueda Suspensión 1×1 Derecha (x2)
- Bloque de armadura ligera (x4)
- sensores (x3)
- Mando a distancia (x1)
- Giroscopio (x2)
- Bloque de temporizador (x1)
- Reactor pequeño (x1)
Tenga en cuenta que, en algunos casos, la ubicación de los bloques es importante. Si está siguiendo esta guía y copiando el PTR-4 (o jugando con los planos del taller), hay un par de detalles cruciales a considerar. El primer detalle es el giroscopio. Cuando diseñé mi primer rover de seguimiento de jugadores, lo hice de modo que ambos giroscopios tuvieran el punto único mirando hacia la parte trasera del rover. Básicamente, esto hace que los giroscopios se reflejen, lo que permite que ambos giroscopios tengan la misma configuración. El segundo detalle es la orientación del sensor. Si bien no es tan crucial, los sensores deben orientarse de modo que la tira indicadora esté en la parte inferior y el panel de control en la parte superior.

Configuración del panel de control de red
Y ahora, lo que probablemente sea la parte más complicada de construir un rover de seguimiento de jugadores: configurar la cuadrícula en el panel de control. Realmente espero que haya cambiado el nombre de los componentes a medida que los construía, específicamente los sensores y giroscopios.
Ajustes de rueda
- Potencia: 60
- Fuerza: 100
- Fricción: 25
- Límite de velocidad: sintonizable (uso 40 kph)
- Anulación de propulsión: 10 % (1): las ruedas derechas pueden necesitar una anulación negativa.
Me gusta agrupar mis ruedas de varias maneras. Primero hago un grupo con todas las ruedas, esto es útil para editar configuraciones en todas las ruedas a la vez. Luego hago un grupo para las ruedas izquierdas, luego las ruedas derechas. Por alguna razón, las ruedas derechas pueden necesitar una anulación negativa. Esto se tratará en la sección de ajuste/depuración de esta guía. Después de configurar las ruedas, asegúrese de desactivarlas en el panel de control hasta que esté listo para probar su rover. Cuando pruebe su rover, recomiendo un límite de velocidad bajo para que pueda atrapar a cualquier rover que intente escapar.
Configuración del giróscopo
La configuración del giroscopio es bastante simple. Primero asegúrese de que ambos giroscopios estén apagados. A continuación, marque la casilla de anulación en el panel de control del giroscopio. Si está copiando esta guía, ambos giroscopios deben tener una anulación de tono de +18 RPM. Esto significa que el giroscopio intentará hacer girar la rejilla 18 rpm (aunque nunca debería girar tan rápido).
Configuración del sensor
Todos los sensores deben configurarse para que solo detecten jugadores/personajes y configurarse para detectar solo al propietario. Todas las demás opciones de detección deben configurarse como "desactivadas".
Rueda delantera
- Ranura de detección (izquierda) Control remoto: estacionar encendido/apagado
- Ranura de pérdida de detección (derecha) Bloque de temporizador – Activar ahora
- Extensión izquierda: 2
- Extensión derecha: 2
- Extensión inferior: 2
- Extensión superior: 2
- Extensión trasera: 5
- Extensión frontal: 4
Unidades
- Ranura de detección (izquierda) Gyro L – Activar
- Ranura de pérdida de detección (derecha) Gyro L – Desactivar
- Extensión izquierda: 50
- Extensión derecha: 50
- Extensión inferior: 2
- Extensión superior: 2
- Extensión trasera: .5
- Extensión frontal: 50
Derecha
- Ranura de detección (izquierda) Gyro R – Activar
- Ranura de pérdida de detección (derecha) Gyro R: desactivar
- Extensión izquierda: 50
- Extensión derecha: 50
- Extensión inferior: 2
- Extensión superior: 2
- Extensión trasera: .5
- Extensión frontal: 50
Nota: si eres como yo, el pitido de los sensores se vuelve molesto después de un tiempo. No olvide desactivar la configuración de detección audible para los sensores en el panel de control.
Configuración del bloque del temporizador
El bloque del temporizador es necesario como solución alternativa. Una de las peculiaridades de los sensores es que no puede tener el mismo activador de "acción de bloqueo" tanto para la detección (ranura izquierda) como para la pérdida de detección (ranura derecha). El juego moverá esa acción a la última ranura que intentó establecer. pulg. Dado que el bloque de control remoto solo tiene el interruptor de encendido/apagado de estacionamiento, y no los comandos de encendido y apagado explícitos, necesitamos el temporizador para que el sensor frontal pueda alternar los frenos cuando detecta al jugador, y cuando ya no detecta el jugador. Para configurar el temporizador, configure el interruptor de encendido/apagado de estacionamiento para el bloque de control remoto en la barra de acción del temporizador. El valor de retardo de tiempo no importa para esta compilación ya que el sensor frontal está configurado para "disparar ahora".
Ajuste y depuración de su móvil/robot
Seré honesto, todavía estoy experimentando activamente con estos. Esta sección cubre algunos problemas que puede encontrar al construir sus propios rovers, así como algunos consejos de ajuste (principalmente giroscopios y configuraciones de ruedas).
Las ruedas giran, pero el rover salta o intenta girar.
Si ve este comportamiento después de configurar su móvil, verifique la dirección de anulación de la rueda. Por alguna razón, los últimos PTR que construí necesitan una anulación negativa en las ruedas del lado derecho. Si su rover comienza a alejarse de usted, deberá girar todas las anulaciones de sus ruedas.
El móvil no se moverá o no se detendrá cuando el sensor frontal detecte al jugador.
Este problema se debe principalmente al hecho de que el freno de estacionamiento está accionado y no se activa o desactiva explícitamente. Si se encuentra con este problema, simplemente acceda al panel de control del móvil y cambie el estado de encendido/apagado del estacionamiento en el bloque de control remoto.
El rover está dando vueltas alrededor del ingeniero y nunca se detiene.
Esto generalmente se debe a un valor de anulación insuficiente en el giroscopio. El rover está girando constantemente, pero la velocidad de giro no es suficiente para que el rover se "encuentre" con el ingeniero. Para arreglar esto, aumente la anulación del giroscopio en pequeños incrementos (~.5 – 1 RPM) hasta que el rover ya no “orbite” al ingeniero.
El rover está girando de forma errática cuando intenta seguir al ingeniero.
Esto puede deberse a algunos problemas.
El primer problema es que la anulación del giroscopio está demasiado alta. Intente disminuir el valor de anulación en pequeños incrementos hasta que el seguimiento se suavice un poco. Sin embargo, tenga cuidado de no bajarlo demasiado, ya que esto puede causar el comportamiento de "orbitación" discutido anteriormente.
Si la configuración de su giroscopio se ve bien, pero el seguimiento sigue siendo errático, puede intentar reducir la fricción de las ruedas. Reducir la fricción reduce el umbral de torque para los giroscopios, y podrán girar el rover más suavemente. Sin embargo, tenga cuidado, ya que la reducción de la fricción de las ruedas impedirá que el rover se detenga. El rover también necesitará más tiempo para alcanzar la velocidad debido a la menor tracción.
El rover se detiene en el ingeniero, pero gira a la izquierda y a la derecha constantemente.
Similar a la sección de seguimiento errático anterior, pero hay una cosa más que puede intentar ajustar. El aumento de la extensión trasera en los sensores izquierdo y derecho crea un "corredor" superpuesto. Si se detecta al ingeniero en este corredor, ambos giroscopios estarán activos y el rover se estabilizará más rápido. El ancho de este corredor también afectará la precisión de seguimiento del rover (todavía estoy experimentando activamente con este método para ajustar los rover).
El rover solo sigue al constructor, y no al jugador previsto.
Para que un rover que hayas creado siga a otro jugador, configúralo como propietario de la cuadrícula. Deberá ingresar al panel de control, seleccionar todos los módulos en el panel de control (ctrl + A para PC) y transferir la propiedad al jugador deseado.
El rover se desliza por todas partes y no sigue al ingeniero.
Al igual que con cualquier rover (pilotado o autónomo), la configuración de fricción de la rueda debe ajustarse para la superficie sobre la que se moverá el rover. Encuentro que para la mayoría de las superficies de roca y tierra, el 25% funciona bien. Si su rover se moverá principalmente sobre superficies "resbaladizas" como hielo o bloques blindados, se necesitará una configuración de fricción más alta.
El rover sigue chocando con el ingeniero o no se detiene lo suficientemente rápido.
Esto se puede arreglar de un par de maneras.
Puede aumentar la fricción de las ruedas para que cuando se apliquen los frenos, el rover se detenga más rápido. Tenga cuidado de no aumentar demasiado la fricción, ya que puede afectar la respuesta de seguimiento del móvil.
También puede aumentar la compensación frontal del sensor frontal para que el móvil detecte al ingeniero antes y tenga más distancia para detenerse. La contrapartida de este método es que el móvil tardará más en ponerse en marcha, ya que el ingeniero estará más tiempo en la zona de "parada".
Eso es todo lo que estamos compartiendo hoy para este Space Engineers guía. Esta guía fue originalmente creada y escrita por Djah00. En caso de que no actualicemos esta guía, puede encontrar la última actualización siguiendo este liga.
