

Kurzanleitung zum Einrichten eines Rovers/Roboters, der den Spieler ohne Skripte verfolgt und ihm folgt. Funktioniert (vorerst) nur auf Planeten. Wird höchstwahrscheinlich durch das KI-Update obsolet.
Einführung und Danksagungen
In erster Linie stehe ich hier auf den Schultern von Giganten. Ingenieure wie BlackArmor und Splitsie sind zwei große Namen, die mich dazu gebracht haben, in diesem Spiel über den Tellerrand zu schauen. Verdammt, das Gyro-Tracking-System ist stark von BlackArmors frühen (Vor-Turret-Controller) Spieler-Tracking-Licht-Designs inspiriert.
Ich kann mich nicht erinnern, warum ich den ersten Player-Tracking-Rover entworfen habe. Ich denke, es war eine Designübung, um zu sehen, was ich ohne einen programmierbaren Block tun könnte. An diejenigen unter Ihnen, die C# verstehen, grüße ich Sie. Ich versuchte, die objektorientierte Programmierung zu verstehen, und bekam nur Kopfschmerzen.
Ich werde den PTR-4 und seinen kleineren (manchmal sagen „niedlicher“) Cousin, den PTR-3, in die Werkstatt schicken. Auch wenn es verlockend sein mag, sich einfach die Workshop-Blaupausen zu besorgen, würde ich Sie ermutigen, zuerst Ihre eigenen zu bauen. Bevor Sie jetzt sagen „aber ich bin nicht schlau genug“ oder „ich bin nicht gut in solchen Dingen“, nutzen Sie diesen Leitfaden als Gelegenheit, etwas zu lernen. Vertrauen Sie mir, wenn ich sage, dass ich beim Entwerfen dieser Rover eine Tonne versagt habe, und die frühen Entwürfe waren nicht im geringsten ästhetisch.
Schnelle Einführung in Gyros
Um ehrlich zu sein, haben Gyros wahrscheinlich einen eigenen Führer verdient. Tatsächlich bin ich mir sicher, dass bereits bessere Anleitungen und Tutorials erstellt wurden. Hier ist also eine kurze, um Sie etwas auf den neuesten Stand zu bringen.
Ein Kreisel ist ein Gerät, das ein Drehmoment oder eine Rotationskraft auf ein Gitter ausübt. Meistens werden Gyros mit Spielereingaben verwendet, um die Ausrichtung dynamischer (beweglicher) Gitter zu steuern. Wenn die Kreiselüberschreibung aktiviert ist, versucht der Kreisel, das Gitter, mit dem er verbunden ist, zu drehen, und ignoriert Spielereingaben. In den Kreiseleinstellungen werden Spinrate und Rotationsachse festgelegt. Für die Spielerverfolgung werden die Kreisel außer Kraft gesetzt.
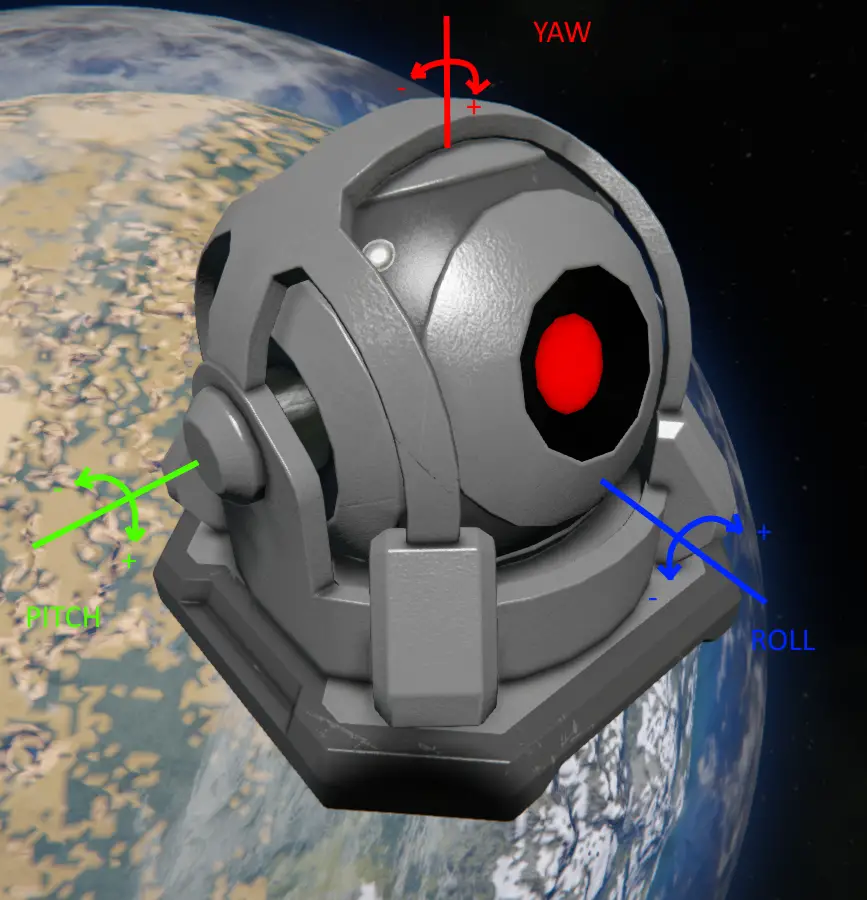
Im obigen Bild sehen Sie die Rotationsachsen („aksees“) des Kreisels und die Rotationsrichtung, wenn ein positiver (+) oder negativer (-) Override-Wert gegeben ist. Beachten Sie, dass eine Seite des kleinen Gitterkreisels einen Divot/Punkt (gezeigt) und die andere Seite zwei hat. Dieses Detail ist entscheidend für die richtige Platzierung des Kreisels und die Optimierung der Einstellungen.
Das PTR-4 Basis-Rover/Roboter-Chassis
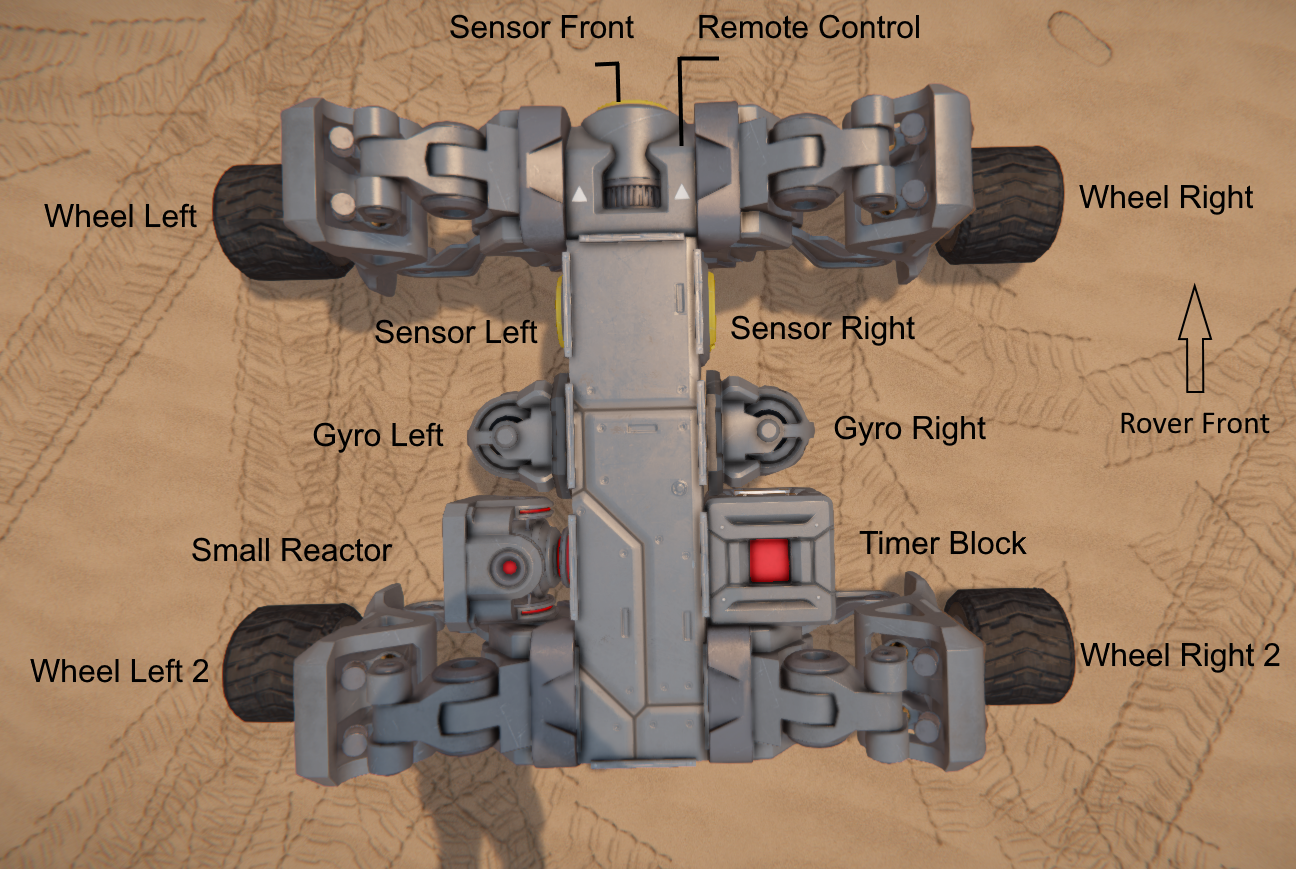
Der PTR-4 ist die vierte Generation meiner PTR- (oder Peter-) Rover-Serie und die fünfte Variante in meiner Entwicklung skriptfreier „Roboter“. Ich habe das PTR-5-Layout so gestaltet, dass es offen und (hoffentlich) leicht verständlich ist. Unten sehen Sie das Layout des Rovers und aller seiner Komponenten.
Einige Tipps zum Bauen: Ich würde empfehlen, zuerst einen Block mit einem Bedienfeld zu platzieren. Dies kann ein Sensor oder der Reaktor sein. Sie brauchen nur eine Möglichkeit, auf das Bedienfeld für das Raster zuzugreifen. Auf diese Weise können Sie die Blöcke beim Platzieren umbenennen, insbesondere die Sensoren und Kreisel (siehe Layoutbild für mein Benennungsschema). Ich empfehle, ohne aktivierte Symmetrie zu bauen, um das Umbenennen zu vereinfachen. Vertrauen Sie mir, wenn ich sage, dass es einfacher ist, beim Bauen umzubenennen, als zu versuchen, herauszufinden, welcher Block welcher ist, nachdem Sie mit dem Bauen fertig sind.
Komplette Teileliste:
- Radaufhängung 1×1 links (x2)
- Radaufhängung 1×1 rechts (x2)
- Leichter Rüstungsblock (x4)
- Sensor (x3)
- Fernbedienung (x1)
- Gyroskop (x2)
- Timer-Block (x1)
- Kleiner Reaktor (x1)
Beachten Sie, dass in einigen Fällen die Blockplatzierung wichtig ist. Wenn Sie dieser Anleitung folgen und den PTR-4 kopieren (oder mit den Werkstattplänen herumspielen), müssen Sie einige wichtige Details beachten. Das erste Detail ist der Kreisel. Als ich meinen ersten Player-Tracking-Rover entwarf, machte ich es so, dass beide Kreisel den einzelnen Divot / Punkt hatten, der zur Rückseite des Rovers zeigte. Dadurch werden die Kreisel im Wesentlichen gespiegelt, sodass beide Kreisel die gleichen Einstellungen haben. Das zweite Detail ist die Sensorausrichtung. Obwohl dies nicht so wichtig ist, sollten die Sensoren so ausgerichtet werden, dass sich der Anzeigestreifen unten und das Bedienfeld oben befindet.

Grid-Systemsteuerung einrichten
Und nun zu dem wahrscheinlich chaotischsten Teil beim Bau eines Player-Tracking-Rover: das Einrichten des Rasters im Bedienfeld. Ich hoffe wirklich, dass Sie die Komponenten beim Bau umbenannt haben, insbesondere die Sensoren und Kreisel.
Radeinstellungen
- Leistung: 60
- Stärke: 100
- Reibung: 25
- Geschwindigkeitsbegrenzung: einstellbar (ich fahre 40 km/h)
- Antriebsübersteuerung: 10 % (1) – Die rechten Räder benötigen möglicherweise eine negative Übersteuerung.
Ich mag es, meine Räder auf ein paar Arten zu gruppieren. Zuerst erstelle ich eine Gruppe mit allen Rädern, dies ist nützlich, um die Einstellungen an allen Rädern gleichzeitig zu bearbeiten. Als nächstes mache ich eine Gruppe für die linken Räder, dann die rechten Räder. Aus irgendeinem Grund benötigen die rechten Räder möglicherweise eine negative Übersteuerung. Dies wird im Tuning-/Debug-Abschnitt dieses Handbuchs behandelt. Nachdem Sie Ihre Räder eingerichtet haben, stellen Sie sicher, dass Sie sie im Bedienfeld ausschalten, bis Sie bereit sind, Ihren Rover zu testen. Wenn Sie Ihren Rover testen, empfehle ich eine niedrige Geschwindigkeitsbegrenzung, damit Sie alle Rover erwischen können, die versuchen, davonzulaufen.
Gyro-Setup
Das Gyro-Setup ist eigentlich ziemlich einfach. Stellen Sie zunächst sicher, dass beide Kreisel ausgeschaltet sind. Aktivieren Sie als Nächstes das Kontrollkästchen „Override“ im Gyro-Bedienfeld. Wenn Sie diese Anleitung kopieren, sollten beide Kreisel einen Pitch-Override von +18 RPM haben. Dies bedeutet, dass der Kreisel versuchen wird, das Gitter mit 18 U / min zu drehen (er sollte sich jedoch niemals so schnell drehen).
Sensoreinrichtung
Alle Sensoren sollten so eingestellt werden, dass sie nur Spieler/Charaktere erkennen und nur den Besitzer erkennen. Alle anderen Erkennungsoptionen sollten auf „Aus“ eingestellt sein.
Vorderreifen
- Erkennungsschlitz (links) Fernbedienung – Parken ein/aus
- Erkennungsverlust-Slot (rechts) Timer-Block – Jetzt auslösen
- Linke Ausdehnung: 2
- Rechter Umfang: 2
- Untere Ausdehnung: 2
- Höchster Umfang: 2
- Rückenumfang: 5
- Frontausdehnung: 4
Links
- Erkennungsschlitz (links) Gyro L – einschalten
- Detection Loss Slot (rechts) Gyro L – ausschalten
- Linke Ausdehnung: 50
- Rechter Umfang: 50
- Untere Ausdehnung: 2
- Höchster Umfang: 2
- Zurück Ausdehnung: .5
- Frontausdehnung: 50
Rechts
- Erkennungsschlitz (links) Gyro R – einschalten
- Detection Loss Slot (rechts) Gyro R – ausschalten
- Linke Ausdehnung: 50
- Rechter Umfang: 50
- Untere Ausdehnung: 2
- Höchster Umfang: 2
- Zurück Ausdehnung: .5
- Frontausdehnung: 50
Hinweis: Wenn Sie wie ich sind, wird das Piepsen der Sensoren nach einer Weile nervig. Vergessen Sie nicht, die akustische Erkennungseinstellung für die Sensoren im Bedienfeld auszuschalten.
Timer-Block-Setup
Der Timer-Block wird als Workaround benötigt. Eine der Macken von Sensoren ist, dass Sie nicht denselben „Block-Aktions“-Auslöser sowohl für die Erkennung (linker Steckplatz) als auch für den Erkennungsverlust (rechter Steckplatz) haben können. Das Spiel verschiebt diese Aktion auf den letzten Steckplatz, an dem Sie versucht haben, sie einzustellen in. Da der Fernbedienungsblock nur den Park-Ein/Aus-Schalter hat und keine expliziten Ein- und Aus-Befehle, brauchen wir den Timer, damit der vordere Sensor die Bremsen umschalten kann, wenn er den Spieler erkennt und wenn er ihn nicht mehr erkennt Spieler. Stellen Sie zum Einrichten des Timers den Park-Ein/Aus-Schalter für den Fernsteuerungsblock in der Timer-Aktionsleiste ein. Der Zeitverzögerungswert spielt für diesen Build keine Rolle, da der vordere Sensor auf „Jetzt auslösen“ eingestellt ist.
Tunen und Debuggen Ihres Rovers/Roboters
Ich bin ehrlich, ich experimentiere selbst immer noch aktiv damit. Dieser Abschnitt behandelt einige Probleme, auf die Sie beim Bau Ihrer eigenen Rover stoßen können, sowie einige Tuning-Tipps (hauptsächlich Kreisel- und Radeinstellungen).
Die Räder drehen sich, aber der Rover hüpft oder versucht sich zu drehen.
Wenn Sie dieses Verhalten nach dem Einrichten Ihres Rovers sehen, überprüfen Sie die Richtung der Radüberschreibung. Aus irgendeinem Grund benötigen die letzten paar PTRs, die ich gebaut habe, eine negative Übersteuerung der Räder auf der rechten Seite. Wenn Ihr Rover anfängt, sich von Ihnen zurückzuziehen, müssen Sie alle Überschreibungen an Ihren Rädern umdrehen.
Der Rover fährt nicht oder hält nicht an, wenn der vordere Sensor den Spieler erkennt.
Dieses Problem ist hauptsächlich darauf zurückzuführen, dass die Feststellbremse umgeschaltet und nicht explizit ein- oder ausgeschaltet wird. Wenn Sie auf dieses Problem stoßen, greifen Sie einfach auf das Bedienfeld des Rovers zu und ändern Sie den Status „Parken ein/aus“ im Fernbedienungsblock.
Der Rover umkreist den Ingenieur und hält nie an.
Dies wird normalerweise durch einen unzureichenden Override-Wert am Gyroskop verursacht. Der Rover dreht sich ständig, aber die Drehgeschwindigkeit reicht nicht aus, damit der Rover dem Ingenieur jemals „begegnet“. Um dies zu beheben, erhöhen Sie die Kreiselübersteuerung in kleinen Schritten (ca. 5 – 1 U/min), bis der Rover den Techniker nicht mehr „umkreist“.
Der Rover dreht sich unregelmäßig, wenn er versucht, dem Ingenieur zu folgen.
Dies kann durch einige Probleme verursacht werden.
Das erste Problem ist, dass der Kreisel-Override zu hoch eingestellt ist. Versuchen Sie, den Override-Wert in kleinen Schritten zu verringern, bis das Tracking etwas glatter wird. Achten Sie jedoch darauf, ihn nicht zu weit zu senken, da dies das zuvor besprochene „umkreisende“ Verhalten verursachen kann.
Wenn Ihre Kreiseleinstellungen in Ordnung aussehen, aber die Spur immer noch unregelmäßig ist, können Sie versuchen, die Reibung der Räder zu verringern. Eine Verringerung der Reibung senkt die Drehmomentschwelle für die Kreisel und sie können den Rover gleichmäßiger drehen. Seien Sie jedoch vorsichtig, da die Verringerung der Radreibung die Fähigkeit des Rovers zum Anhalten beeinträchtigt. Der Rover benötigt aufgrund der geringeren Traktion auch mehr Zeit, um auf Geschwindigkeit zu kommen.
Der Rover hält am Ingenieur an, dreht sich aber ständig nach links und rechts.
Ähnlich wie im Abschnitt über unregelmäßiges Tracking oben, aber es gibt noch eine weitere Sache, die Sie versuchen können, abzustimmen. Durch Erhöhen der hinteren Ausdehnung am linken und rechten Sensor entsteht ein überlappender „Korridor“. Wenn der Ingenieur in diesem Korridor entdeckt wird, sind beide Kreisel aktiv und der Rover stabilisiert sich schneller. Die Breite dieses Korridors wirkt sich auch auf die Ortungsgenauigkeit des Rovers aus (ich experimentiere immer noch aktiv mit dieser Methode zum Einstellen der Rover.)
Der Rover folgt nur dem Erbauer und nicht dem beabsichtigten Spieler.
Damit ein von Ihnen erstellter Rover einem anderen Spieler folgt, legen Sie ihn als Grid-Besitzer fest. Sie müssen in die Systemsteuerung gehen, alle Module in der Systemsteuerung auswählen (Strg+A für PC) und die Eigentümerschaft auf den vorgesehenen Player übertragen.
Der Rover rutscht überall hin und verfolgt den Ingenieur nicht.
Wie bei jedem Rover (pilotiert oder autonom) muss die Radreibungseinstellung auf die Oberfläche abgestimmt werden, auf der sich der Rover bewegt. Ich finde für die meisten Stein- und Schmutzoberflächen, dass 25% gut funktionieren. Wenn sich Ihr Rover hauptsächlich auf „glatten“ Oberflächen wie Eis oder Panzerblöcken bewegt, ist eine höhere Reibungseinstellung erforderlich.
Der Rover fährt immer wieder in den Ingenieur oder stoppt nicht schnell genug.
Dies kann auf verschiedene Arten behoben werden.
Sie können die Radreibung erhöhen, sodass der Rover beim Bremsen schneller anhält. Achten Sie darauf, die Reibung nicht zu stark zu erhöhen, da dies die Verfolgungsreaktion des Rovers beeinträchtigen kann.
Sie können auch den vorderen Versatz des vorderen Sensors erhöhen, damit der Rover den Techniker früher erkennt und mehr Abstand zum Anhalten hat. Der Nachteil dieser Methode besteht darin, dass der Rover länger braucht, um zu starten, da sich der Techniker länger in der „Stopp“-Zone aufhält.
Das ist alles, was wir heute dafür teilen Space Engineers führen. Dieses Handbuch wurde ursprünglich erstellt und geschrieben von Djah00. Falls wir dieses Handbuch nicht aktualisieren, finden Sie das neueste Update, indem Sie diesen folgen Link.
