

Ich konnte keine englischsprachigen Anleitungen zu Kamera- oder Überwachungssystemen finden, also ist hier ein Beispiel für eine, die ich von Grund auf neu erstellt habe. Wie sonst können Sie wissen, was diese lästigen Bots und Clowns vorhaben?
Was Sie brauchen
In diesem Handbuch wird nicht erklärt, wie man den U-Boot-Editor verwendet, das müssen Sie woanders oder selbst lernen.
Neben einem Periskop u n Kameras benötigen Sie diese Komponenten:
- 1 Relaiskomponente für jede Kamera (zur Steuerung der Kamerasignalquelle)
- 1 Signalkomponente für jede Kamera (damit sich jedes Relais beim Klicken selbst ausschaltet)
- 1 Verzögerungskomponente für jede Kamera (mit 1 oder 0.5 Verzögerung, es liegt an Ihnen)
Ich empfehle, Ihr Sub tatsächlich fertigzustellen und zu entscheiden, wo Sie Kameras haben möchten, anstatt das ganze verdammte Ding um Ihr neues Kamerasystem herum zu bauen. 😛
Das einzige, was Sie für die Eigenschaften dieser Komponenten ändern müssen, ist, das erste Relais in der Daisy-Chain im Editor einzuschalten (sie sind standardmäßig eingeschaltet) und alle anderen Relais auszuschalten.
Bei richtiger Ausführung beginnt die Kamerasteuerung mit dem letzten Relais in der Kette und ermöglicht es, dass alle Kameras mit einem Mausklick eine Schleife nach der anderen durchlaufen.
Verdrahtung
Hier ist, wie die Verdrahtung für jede Komponente geht.
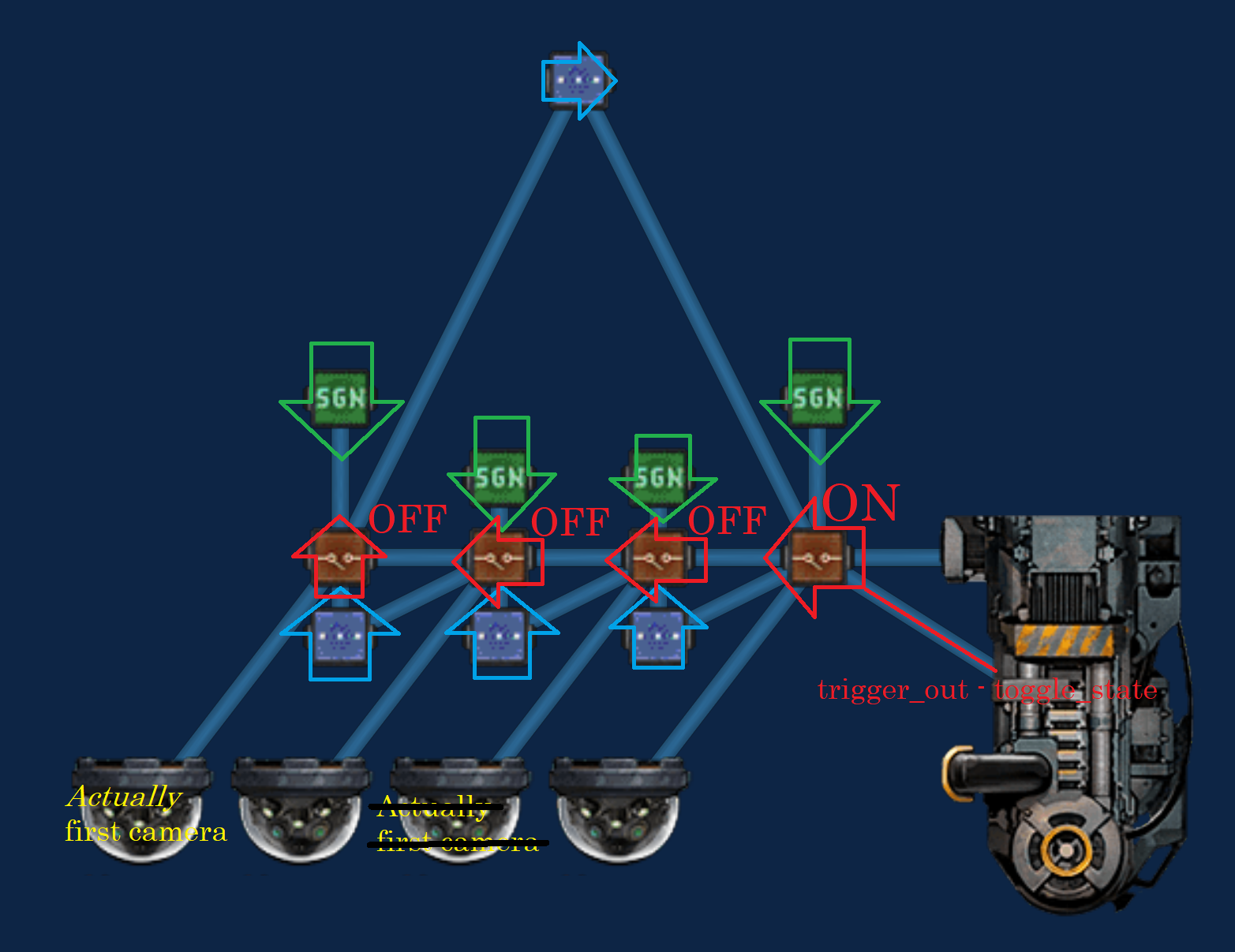
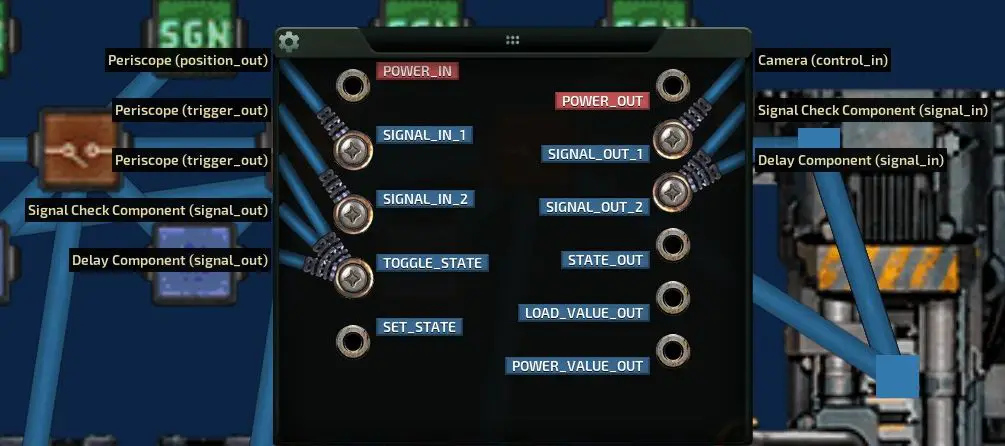
Draht vom Periskop position_out Pin zu jedem Relais signal_in_1 Stift.
Draht vom Periskop trigger_out Pin zu jedem Relais signal_in_2 Stift.
Das Triggersignal muss auch separat auf das erste Relais verdrahtet werden (trigger_out -> toggle_state)!

Wie oben erwähnt, muss das erste Relais im Editor ebenfalls auf EIN gesetzt werden, während nachfolgende Relais auf AUS geschaltet werden müssen. Die Schleife kann nicht wiederholt werden, wenn dies nicht korrekt durchgeführt wird.
Das Bild zeigt, wie die Verkabelung für die aussieht zuerst Relaiskomponente! Alle anderen Relais haben einen Draht weniger am Toggle_state-Pin.
Von jedem Relais verdrahten signal_in_1 Pin an die Kamera control_in Stift.
Draht ab signal_in_2 Pin zu den gepaarten Signal- und Verzögerungskomponenten jedes Relais signal_in Stift.
Alle anderen Relaiskomponenten sollten identisch sein ausgeschlossen dass ihnen das trigger_out-Signal vom Periskop fehlt, das direkt in toggle_state geht.
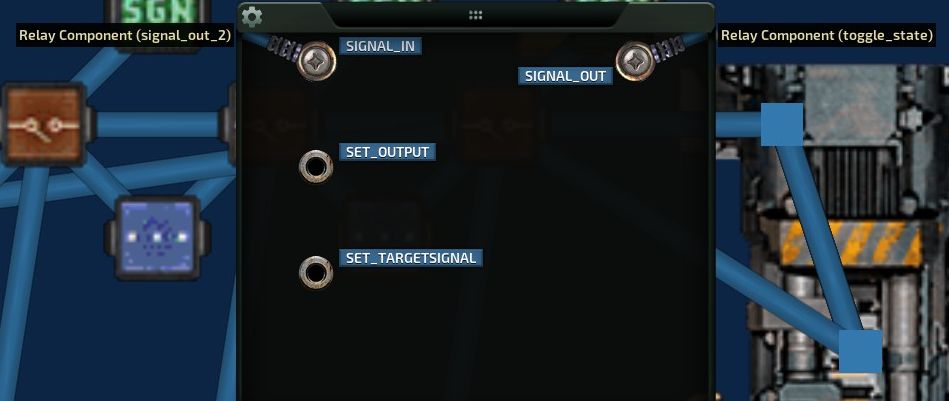
Die Signalprüfung ist nur dazu da, das Signal zu schleifen, damit sich das Relais selbst ausschaltet, wenn es einen Triggereingang empfängt, und es dem nächsten Relais in der Reihe ermöglicht, die Ausgänge des Periskops zu verarbeiten.
Schweißdraht signal_out von jedem Signal zurück zu den Relais seiner Quelle toggle_state Stift.
Sie können die Verzögerung in den Komponenteneigenschaften nach Ihren Wünschen ändern. Ich bevorzuge 0.5 Sekunden Verzögerung.
Schweißdraht signal_out von jeder Verzögerung zu den nächsten Relais toggle_state Stift.

Aufzeichnung des Kamerasystems in Aktion
Mit 0.5 Verzögerung
https://youtu.be/e35UEBRx7o4
Der Kern der Verkabelung besteht also darin, die Steuerung von jedem Relais und die Ansicht von jeder Kamera mit einem Mausklick einfach an die nächste weiterzugeben.
Lassen Sie mich in den Kommentaren wissen, wenn Sie Fragen oder Verbesserungsvorschläge haben. 🙂 Ich weiß, dass dies keine große Anleitung ist, aber wenn Sie die Grundlagen des U-Boot-Editors und der Verkabelung lernen, sollten Sie in der Lage sein, dies selbst zu erstellen. Ich werde das System vielleicht irgendwann auch auf den Workshops veröffentlichen. Danke fürs Lesen!
Das ist alles, was wir heute dafür teilen Barotrauma führen. Dieses Handbuch wurde ursprünglich erstellt und geschrieben von 76561198014977458. Falls wir dieses Handbuch nicht aktualisieren, finden Sie das neueste Update, indem Sie diesen folgen Link.
