

Краткое руководство по настройке ровера/робота, который отслеживает и следует за игроком без скриптов. Работает только на планетах (на данный момент…) Скорее всего, будет устаревшим из-за ИИ.. Обновлять.
Введение и Благодарности
Прежде всего, Я стою здесь на плечах гигантов. Такие инженеры, как BlackArmor и Splitsie, — два громких имени, которые заставили меня мыслить нестандартно в этой игре.. Черт, Система гироскопического слежения во многом вдохновлена ранними версиями BlackArmor. (предтурельный контроллер) Дизайн света для отслеживания игрока.
Я не могу вспомнить, почему я разработал первый вездеход для отслеживания игроков.. Я думаю, это было упражнение в дизайне, чтобы посмотреть, что я мог бы сделать без программируемого блока. Для тех из вас, кто понимает C#, Я приветствую тебя. Я пытался понять объектно-ориентированное программирование, и все, что у меня было, это головная боль.
Я буду выкладывать ПТР-4., и он меньше (некоторые могут сказать “симпатичнее”) двоюродный брат, ПТР-3 в мастерскую. Хотя может возникнуть соблазн просто пойти и взять чертежи мастерской., Я бы посоветовал вам сначала создать свой собственный. Теперь, прежде чем ты пойдешь и скажешь “но я недостаточно умен” или “Я не силен в таких вещах” используйте это руководство как возможность научиться. Поверьте мне, когда я говорю, что я потерпел огромную неудачу при проектировании этих марсоходов., и ранние конструкции не были ни в малейшей степени эстетичными.
Краткое описание гироскопов
Если быть честным, гирос, вероятно, заслуживают отдельного гида. Фактически, Я уверен, что уже созданы лучшие руководства и учебные пособия.. Итак, вот краткий обзор, который поможет вам немного вникнуть в суть дела..
Гироскоп – это устройство, создающее крутящий момент., или вращающая сила сетки. Большую часть времени гироскопы используются совместно с игроком для управления ориентацией динамических объектов. (подвижный) сетки. Когда включено переопределение гироскопа, гироскоп будет пытаться вращать сетку, к которой он подключен., и игнорировать действия игрока. Скорость вращения и ось вращения определяются в настройках гироскопа.. Для отслеживания игроков, гироскопы переопределены.
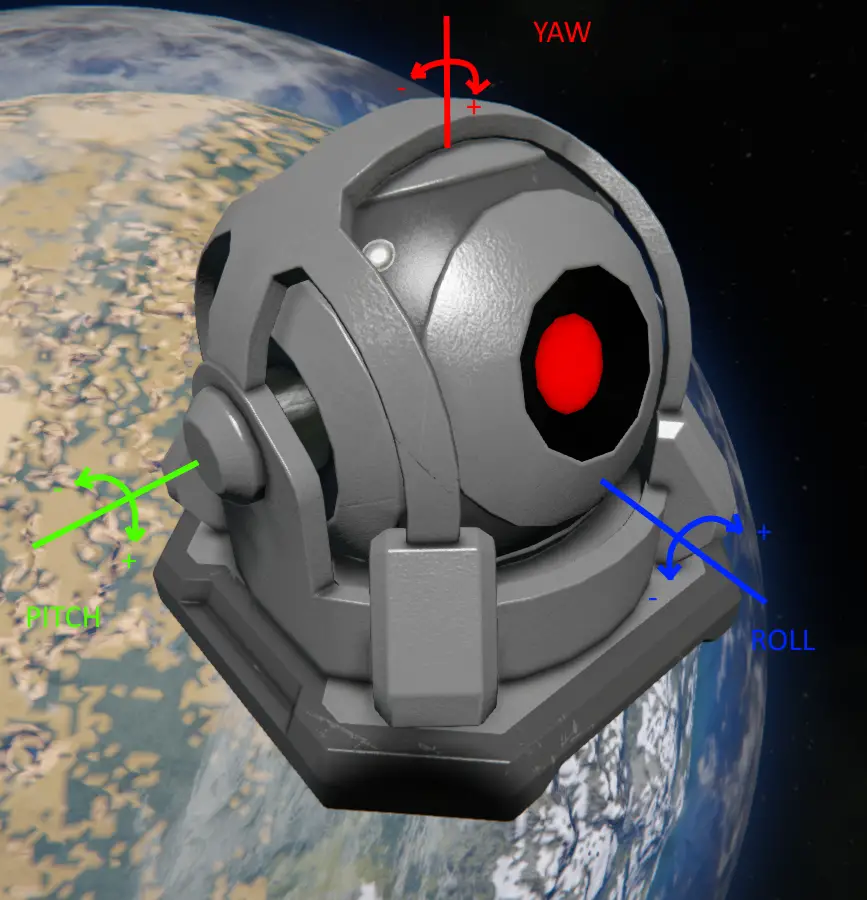
На изображении выше вы можете увидеть оси (“ось”) вращения на гироскопе, и направление вращения при положительном (+) или отрицательный (-) переопределить значение. Обратите внимание, что на одной стороне маленького гироскопа сетки есть одна точка. (показано,) а у другой стороны есть два. Эта деталь имеет решающее значение для правильного размещения гироскопа и настройки настроек..
Базовый шасси вездехода/робота PTR-4
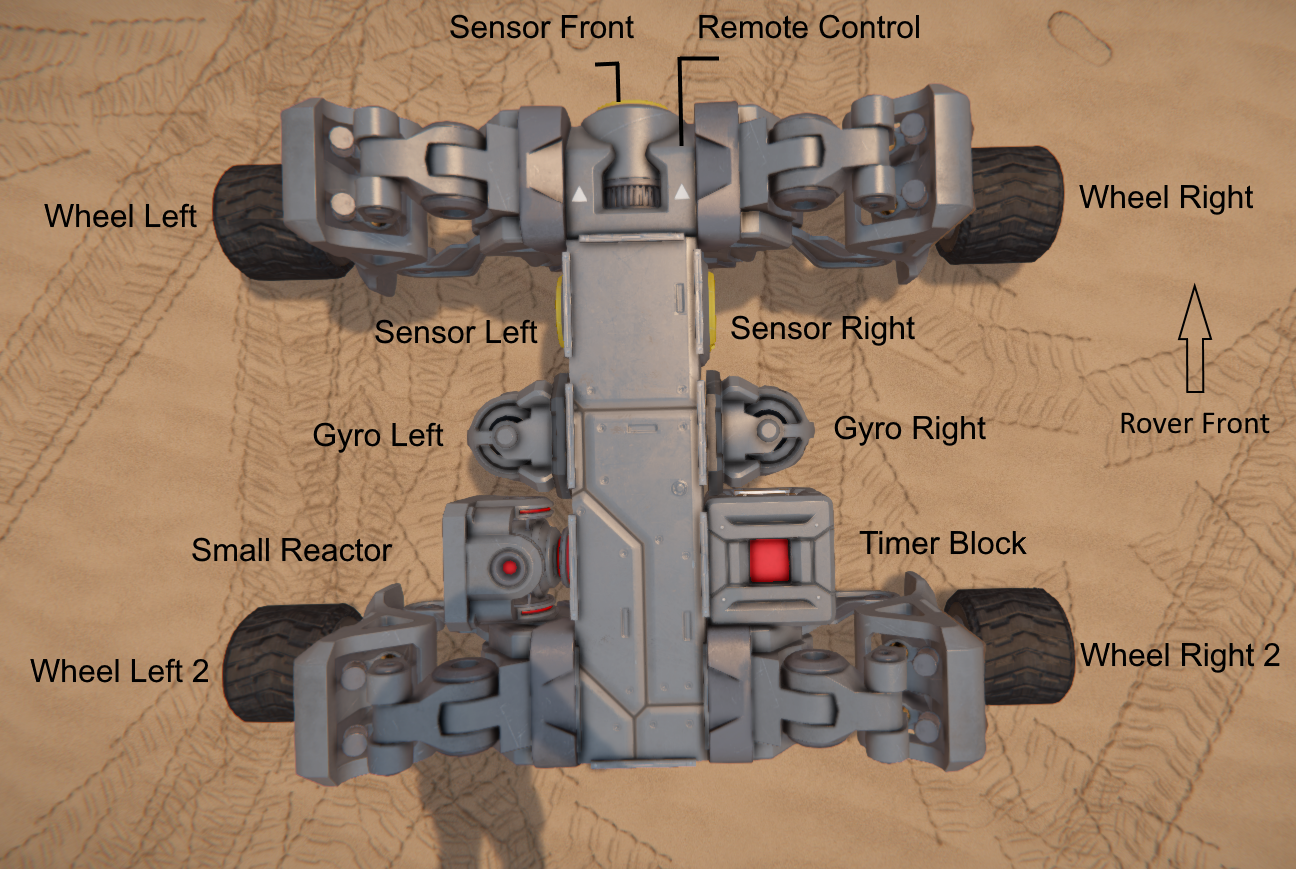
ПТР-4 — четвертое поколение моего ПТР. (или Питер) серия марсоходов, и 5-й вариант в моей разработке без скриптов “роботы.” Компоновку ПТР-4 я спроектировал открытой., и (с надеждой) легко понять. Ниже, вы можете увидеть макет марсохода, и все его компоненты.
Несколько советов по построению: Я бы рекомендовал сначала поставить блок с панелью управления. Это может быть датчик, или реактор. Вам просто нужен доступ к панели управления сеткой.. Таким образом, вы можете переименовывать блоки по мере их размещения., особенно датчики и гироскопы (см. изображение макета моей схемы именования.) Я рекомендую строить без включения симметрии, чтобы упростить переименование.. Поверьте мне, когда я говорю, что легче переименовывать по мере сборки, чем пытаться выяснить, какой блок какой после того, как вы закончите сборку..
Полный список деталей:
- Подвеска колес 1×1 Левый (х2)
- Подвеска колес 1×1 Верно (х2)
- Блок легкой брони (х4)
- Датчик (х3)
- Пульт дистанционного управления (х1)
- Гироскоп (х2)
- Блок таймера (х1)
- Малый реактор (х1)
Обратите внимание, что в некоторых случаях размещение блоков имеет важное значение.. Если вы следуете этому руководству и копируете PTR-4 (или возиться с чертежами мастерской) есть пара важных деталей, которые следует учитывать. Первая деталь — гироскоп. Когда я проектировал свой первый вездеход для отслеживания игроков, я сделал так, чтобы у обоих гироскопов была одна точка, обращенная к задней части марсохода.. По сути, это делает гироскопы зеркальными., позволяя обоим гироскопам иметь одинаковые настройки. Вторая деталь — ориентация датчика. Хоть и не столь критично, датчики должны быть ориентированы так, чтобы индикаторная полоска находилась внизу, и панель управления вверху.

Настройка панели управления сетью
А теперь, пожалуй, самая запутанная часть создания вездехода для слежения за игроками.: настройка сетки в панели управления. Я очень надеюсь, что вы переименовали компоненты по мере их создания., особенно датчики и гироскопы.
Настройки колеса
- Власть: 60
- Сила: 100
- Трение: 25
- Ограничение скорости: настраиваемый (Я использую 40 км/ч)
- Блокировка движения: 10% (.1) – Правым колесам может потребоваться отрицательное переопределение..
Мне нравится группировать колеса несколькими способами.. Сначала делаю группу со всеми колесами, это полезно для редактирования настроек на всех колесах одновременно. Далее делаю группу для левых колес., тогда правильные колеса. По какой-то причине правым колесам может потребоваться отрицательное переопределение.. Это будет описано в разделе настройки/отладки данного руководства.. После того, как ваши колеса настроены, обязательно выключите их на панели управления, пока вы не будете готовы протестировать свой вездеход.. При тестировании вашего вездехода я рекомендую устанавливать низкий предел скорости, чтобы вы могли поймать любого марсохода, пытающегося убежать от него..
Настройка гироскопа
Настройка гироскопа на самом деле довольно проста.. Сначала убедитесь, что оба гироскопа выключены.. Затем установите флажок «Переопределить» на панели управления гироскопом.. Если вы копируете это руководство, оба гироскопа должны иметь корректировку угла наклона +18 об/мин. Это означает, что гироскоп попытается раскрутить сетку. 18 об/мин (однако он не должен вращаться так быстро.)
Настройка датчика
Все датчики должны быть настроены так, чтобы они обнаруживали только игроков/персонажей., и настроено определение только владельца. Все остальные параметры обнаружения должны быть установлены на “выключенный.”
Передний
- Слот обнаружения (левый) Пульт дистанционного управления – Парковка вкл/выкл
- Слот обнаружения потерь (верно) Блок таймера – Запустить сейчас
- Левый экстент: 2
- Правильный экстент: 2
- Нижний экстент: 2
- Верхний экстент: 2
- Назад Экстент: 5
- Передний экстент: 4
Левый
- Слот обнаружения (левый) Гиро Л – Включить
- Слот обнаружения потерь (верно) Гиро Л – Выключить
- Левый экстент: 50
- Правильный экстент: 50
- Нижний экстент: 2
- Верхний экстент: 2
- Назад Экстент: .5
- Передний экстент: 50
Верно
- Слот обнаружения (левый) Гироскоп Р – Включить
- Слот обнаружения потерь (верно) Гироскоп Р – Выключить
- Левый экстент: 50
- Правильный экстент: 50
- Нижний экстент: 2
- Верхний экстент: 2
- Назад Экстент: .5
- Передний экстент: 50
Примечание: Если ты похож на меня, писк датчиков через некоторое время начинает раздражать. Не забудьте отключить настройку звукового оповещения датчиков в панели управления..
Настройка блока таймера
Блок таймера необходим в качестве обходного пути. Одна из особенностей датчиков заключается в том, что у вас не может быть одинаковых “блокировать действие” триггер для обнаружения (левый слот,) и потеря обнаружения (правый слот.) Игра переместит это действие в последний слот, в котором вы пытались его установить.. Поскольку блок дистанционного управления имеет только переключатель включения/выключения парковки., а не явные команды включения и выключения, нам нужен таймер, чтобы передний датчик мог включать тормоза при обнаружении игрока, и когда он больше не обнаруживает игрока. Чтобы настроить таймер, установите переключатель включения/выключения парковки для блока дистанционного управления в панели действий таймера. Значение временной задержки не имеет значения для этой сборки, так как передний датчик установлен в положение “триггер сейчас.”
Настройка и отладка вашего вездехода/робота
я буду честен, Я сам до сих пор активно экспериментирую с этим. В этом разделе рассматриваются некоторые проблемы, с которыми вы можете столкнуться при создании собственных вездеходов., а также несколько советов по настройке (в основном гироскопы и настройки руля.)
Колеса вращаются, но марсоход прыгает, или пытается повернуть.
Если вы видите такое поведение после настройки ровера, проверьте направление перерегулирования колеса. По какой-то причине последние несколько PTR, которые я построил, нуждаются в отрицательном переопределении на правых колесах.. Если ваш ровер начинает пятиться от вас, вам нужно будет переключить все переопределения на колесах.
Ровер не поедет, или не остановится, когда передний датчик обнаружит игрока.
Эта проблема в основном связана с тем, что стояночный тормоз включен., и не включен или выключен явно. Если вы столкнулись с этой проблемой, просто войдите в панель управления ровера и измените состояние включения/выключения парковки в блоке дистанционного управления..
Ровер кружит над инженером и не останавливается.
Обычно это вызвано недостаточным значением коррекции на гироскопе.. Ровер постоянно вращается, но скорости поворота недостаточно, чтобы марсоход когда-либо “сталкиваться” инженер. Чтобы это исправить, увеличивайте переопределение гироскопа небольшими шагами (~.5 – 1 об/мин) пока марсоход не исчезнет “орбиты” инженер.
Ровер хаотично поворачивает, пытаясь следовать за инженером.
Это может быть вызвано несколькими проблемами.
Первая проблема заключается в том, что коррекция гироскопа установлена слишком высоко.. Попробуйте уменьшить значение переопределения небольшими шагами, пока отслеживание не станет немного сглаживаемым.. Будьте осторожны, не опускайте его слишком сильно., так как это может привести к “вращающийся по орбите” поведение обсуждалось ранее.
Если настройки гироскопа в порядке, но отслеживание по-прежнему нестабильно, можно попробовать уменьшить трение колес. Уменьшение трения снижает порог крутящего момента для гироскопов., и они смогут плавнее поворачивать марсоход. Будьте осторожны, хотя, снижение трения колес помешает марсоходу остановиться. Роверу также потребуется больше времени, чтобы набрать скорость из-за более низкой тяги..
Ровер останавливается у инженера, но постоянно поворачивает налево и направо.
Аналогично разделу о неустойчивом отслеживании выше., но есть еще кое-что, что вы можете попробовать настроить. Увеличение задней части левого и правого датчиков приводит к перекрытию. “коридор.” Если инженер обнаружен в этом коридоре, оба гироскопа будут активны., и ровер стабилизируется быстрее. Ширина этого коридора также повлияет на точность слежения марсохода. (Я до сих пор активно экспериментирую с этим методом настройки марсоходов.)
Ровер следует только за строителем, а не предполагаемый игрок.
Чтобы получить созданный вами вездеход, следуйте за другим игроком., установить их как владельца сетки. Вам нужно будет зайти в панель управления, выберите все модули в панели управления (Ctrl+A для ПК,) и передать право собственности предполагаемому игроку.
Ровер скользит повсюду, и не следить за инженером.
Как и любой марсоход (пилотируемый или автономный,) настройка трения колес должна быть настроена для поверхности, по которой будет двигаться марсоход.. Я считаю, что для большинства каменных и грунтовых поверхностей 25% работает нормально. Если ваш ровер будет двигаться в основном по “пройдоха” поверхности как лед, или блоки брони, потребуется более высокая настройка трения.
Ровер продолжает наезжать на инженера, или не останавливаешься достаточно быстро.
Это можно исправить несколькими способами.
Вы можете увеличить трение колес, чтобы при нажатии на тормоз марсоход останавливался быстрее.. Будьте осторожны, не увеличивайте трение слишком сильно, поскольку это может повлиять на реакцию марсохода на отслеживание..
Вы также можете увеличить смещение переднего датчика, чтобы марсоход быстрее обнаружил инженера., и у него больше расстояния для остановки. Недостатком этого метода является то, что марсоходу потребуется больше времени для запуска, поскольку инженер будет находиться в “останавливаться” зона длиннее.
Это все, чем мы делимся сегодня для этого. Космические инженеры гид. Это руководство было первоначально создано и написано Да, 00. На случай, если нам не удастся обновить это руководство, вы можете найти последнее обновление, следуя этому связь.