

Мне не удалось найти руководства на английском языке по камерам или системам наблюдения., вот пример того, что я сделал с нуля. Откуда еще можно знать, какие махинации затевают эти надоедливые боты и клоуны??
Что вам нужно
В этом руководстве не объясняется, как использовать редактор подводных лодок., тебе придется научиться этому где-нибудь еще или самому.
Помимо перископа и н камеры, вам нужны эти компоненты:
- 1 Релейный компонент для каждой камеры (для управления источником сигнала камеры)
- 1 Компонент сигнала для каждой камеры (чтобы позволить каждому реле выключаться при нажатии)
- 1 Компонент задержки для каждой камеры (с 1 или 0.5 задерживать, тебе решать)
Я рекомендую на самом деле закончить сабвуфер и решить, где вам нужны камеры, вместо того, чтобы строить всю эту чертову штуку вокруг вашей новой системы камер.. 😛
Единственное, что вам придется изменить в свойствах этих компонентов, — это включить первое реле в цепочке в редакторе. (они включены по умолчанию) и выключите все остальные реле..
Когда все сделано правильно, управление камерой начнется с последнего реле в цепочке и позволит всем камерам переключаться одна за другой одним щелчком мыши..
Электропроводка
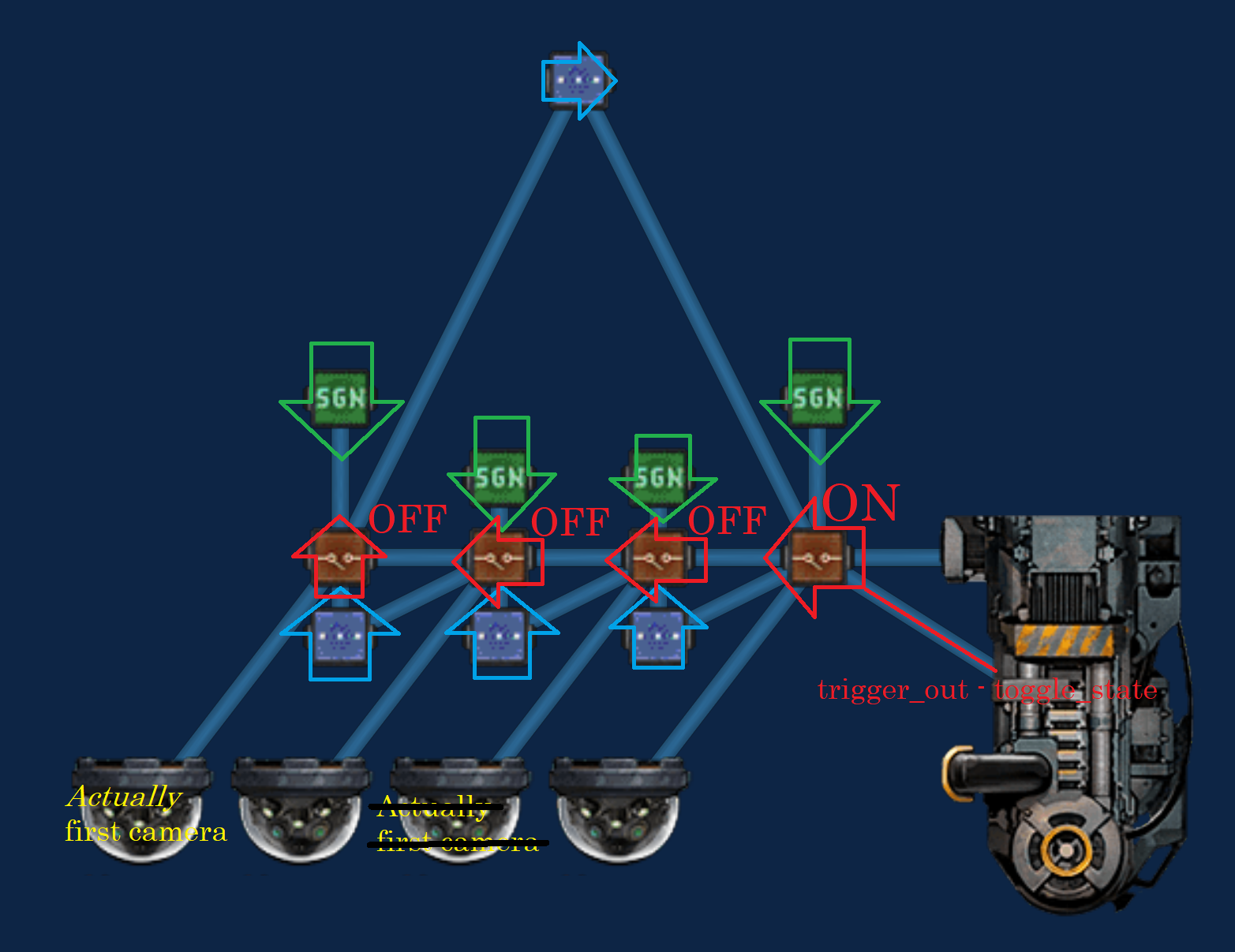
Вот как проходит проводка для каждого компонента.
Провод от перископа позиция_выход контакт к каждому реле сигнал_в_1 приколоть.
Провод от перископа триггер_out контакт к каждому реле сигнал_в_2 приколоть.
Сигнал триггера также должен быть подключен к первому реле отдельно. (триггер_out -> toggle_state)!

Как упоминалось выше, первое реле также должно быть включено в редакторе, а последующие реле должны быть выключены.. Цикл нельзя повторить, если это сделано неправильно..
На рисунке показано, как выглядит проводка первый Релейный компонент! Все остальные реле имеют на один провод меньше на выводе toggle_state..
От каждого реле, провод от сигнал_в_1 прикрепить к камере control_in приколоть.
Провод от сигнал_в_2 вывод к парным компонентам сигнала и задержки каждого реле. сигнал_вход приколоть.
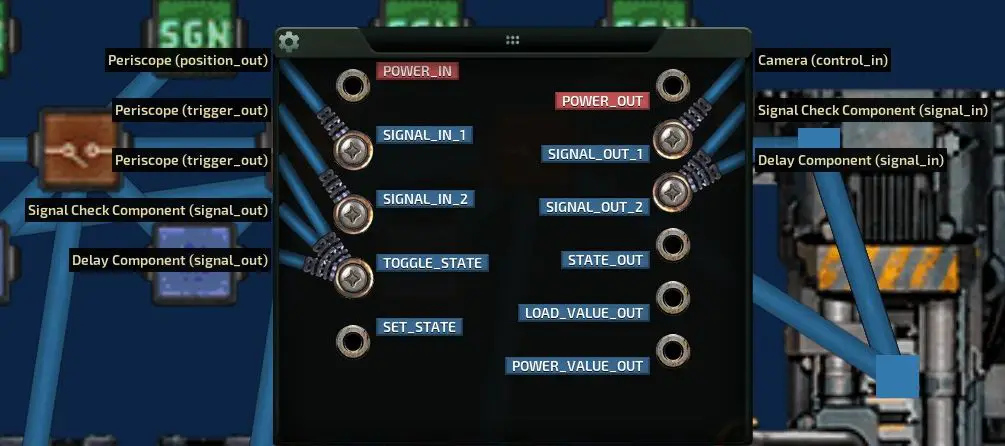
Все остальные компоненты реле должны быть идентичными. кроме что им не хватает сигнала триггера_out от перископа, который поступает прямо в toggle_state.
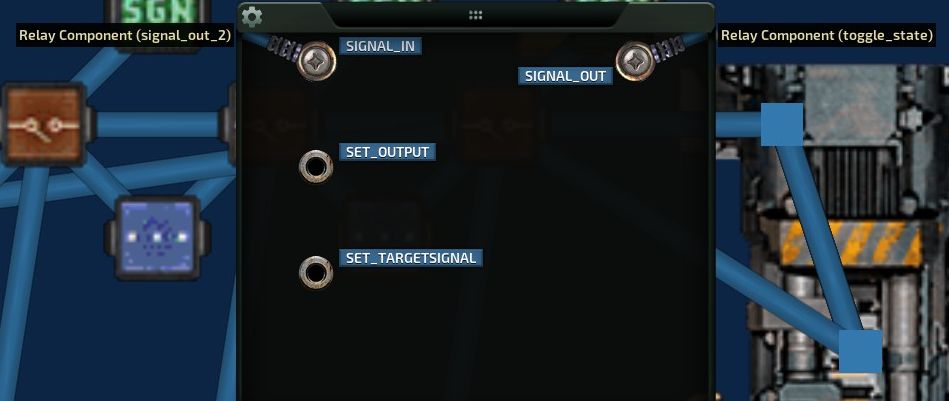
Проверка сигнала предназначена только для того, чтобы зациклить сигнал, чтобы реле отключалось при получении триггерного входного сигнала и позволяло следующему реле в очереди обрабатывать выходные сигналы перископа..
Проволока сигнал_выход от каждой проверки сигнала обратно к его источнику реле. toggle_state приколоть.
Вы можете изменить задержку по своему вкусу в свойствах компонента.. Я предпочитаю 0.5 вторая задержка.
Проволока сигнал_выход от каждой задержки до следующего реле toggle_state приколоть.

Запись системы камер в действии
С 0.5 задерживать
https://youtu.be/e35UEBRx7o4
Таким образом, суть проводки заключается в том, чтобы просто передать управление от каждого реле и просмотреть изображение с каждой камеры на следующую одним щелчком мыши..
Дайте мне знать в комментариях, если у вас есть какие-либо вопросы или предложения по улучшению.. 🙂 Я знаю, что это не совсем руководство, но если вы изучите основы редактора подводных лодок и проводки, вы должны быть в состоянии построить это самостоятельно. Возможно, в какой-то момент я также опубликую систему в Мастерских.. Спасибо за чтение!
Это все, чем мы делимся сегодня для этого. Баротравма гид. Это руководство было первоначально создано и написано 76561198014977458. На случай, если нам не удастся обновить это руководство, вы можете найти последнее обновление, следуя этому связь.